 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA holistic perception system of internal and external monitoring for ground autonomous vehicles: AutoTRUST paradigm
Aug 25, 2025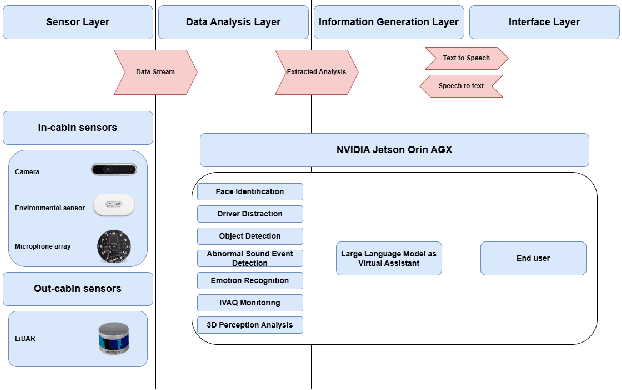
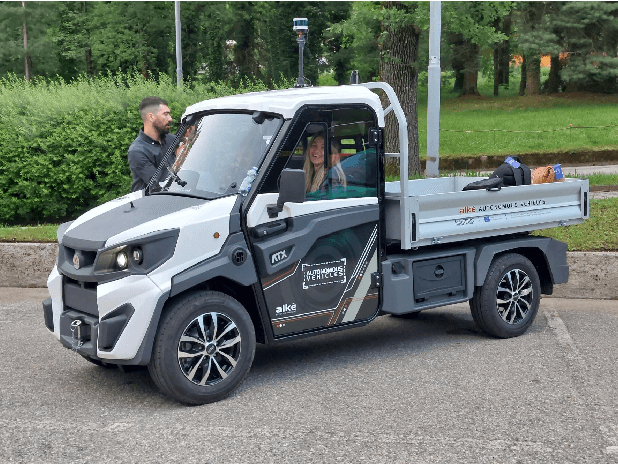
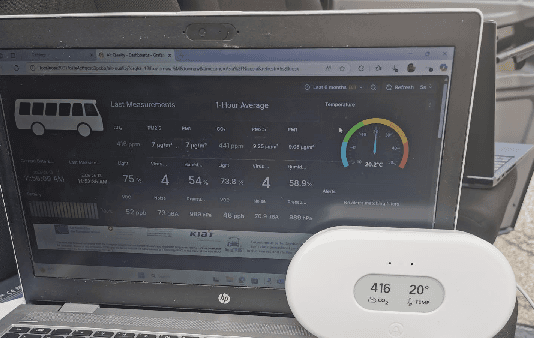
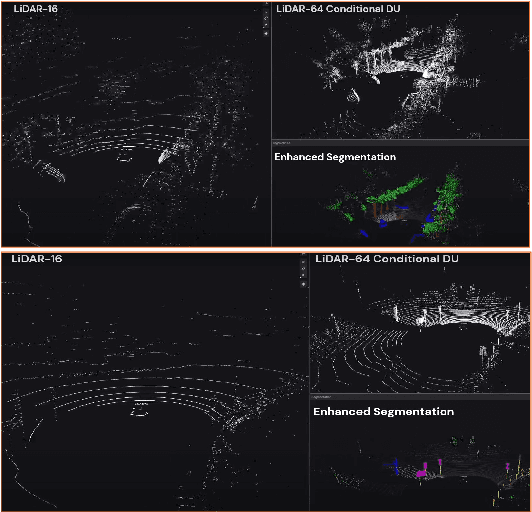
This paper introduces a holistic perception system for internal and external monitoring of autonomous vehicles, with the aim of demonstrating a novel AI-leveraged self-adaptive framework of advanced vehicle technologies and solutions that optimize perception and experience on-board. Internal monitoring system relies on a multi-camera setup designed for predicting and identifying driver and occupant behavior through facial recognition, exploiting in addition a large language model as virtual assistant. Moreover, the in-cabin monitoring system includes AI-empowered smart sensors that measure air-quality and perform thermal comfort analysis for efficient on and off-boarding. On the other hand, external monitoring system perceives the surrounding environment of vehicle, through a LiDAR-based cost-efficient semantic segmentation approach, that performs highly accurate and efficient super-resolution on low-quality raw 3D point clouds. The holistic perception framework is developed in the context of EU's Horizon Europe programm AutoTRUST, and has been integrated and deployed on a real electric vehicle provided by ALKE. Experimental validation and evaluation at the integration site of Joint Research Centre at Ispra, Italy, highlights increased performance and efficiency of the modular blocks of the proposed perception architecture.
Quantitative and Qualitative Assessment of Indoor Exploration Algorithms for Autonomous UAVs
May 27, 2022
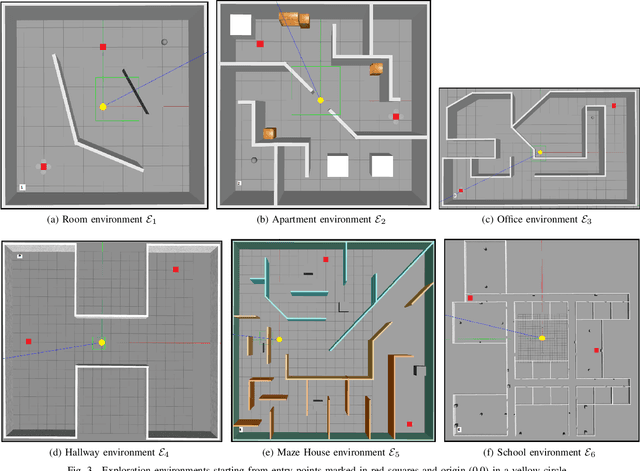

Indoor exploration is an important task in disaster relief, emergency response scenarios, and Search And Rescue (SAR) missions. Unmanned Aerial Vehicle (UAV) systems can aid first responders by maneuvering autonomously in areas inside buildings dangerous for humans to traverse, exploring the interior, and providing an accurate and reliable indoor map before the emergency response team takes action. Due to the challenging conditions in such scenarios and the inherent battery limitations and time constraints, we investigate 2D autonomous exploration strategies (e.g., based on 2D LiDAR) for mapping 3D indoor environments. First, we introduce a battery consumption model to consider the battery life aspect for the first time as a critical factor for evaluating the flight endurance of exploration strategies. Second, we perform extensive simulation experiments in diverse indoor environments using various state-of-the-art 2D LiDAR-based exploration strategies. We evaluate our findings in terms of various quantitative and qualitative performance indicators, suggesting that these strategies behave differently depending on the complexity of the environment and initial conditions, e.g., the entry point.