 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Detect Slip with Barometric Tactile Sensors and a Temporal Convolutional Neural Network
Feb 19, 2022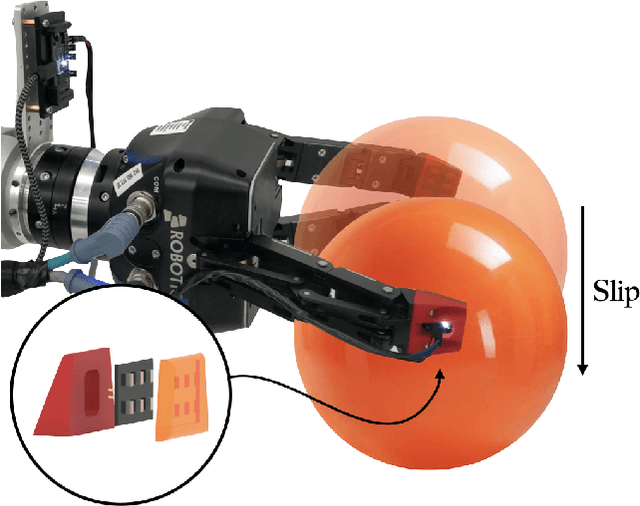
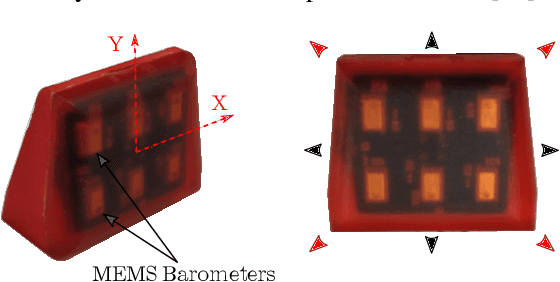
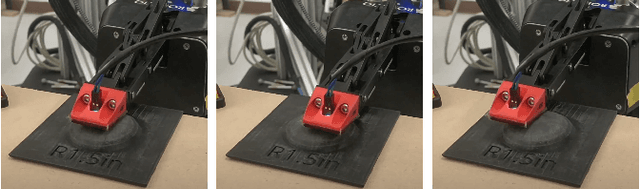

The ability to perceive object slip via tactile feedback enables humans to accomplish complex manipulation tasks including maintaining a stable grasp. Despite the utility of tactile information for many applications, tactile sensors have yet to be widely deployed in industrial robotics settings; part of the challenge lies in identifying slip and other events from the tactile data stream. In this paper, we present a learning-based method to detect slip using barometric tactile sensors. These sensors have many desirable properties including high durability and reliability, and are built from inexpensive, off-the-shelf components. We train a temporal convolution neural network to detect slip, achieving high detection accuracies while displaying robustness to the speed and direction of the slip motion. Further, we test our detector on two manipulation tasks involving a variety of common objects and demonstrate successful generalization to real-world scenarios not seen during training. We argue that barometric tactile sensing technology, combined with data-driven learning, is suitable for many manipulation tasks such as slip compensation.
Observability-Aware Trajectory Optimization: Theory, Viability, and State of the Art
Sep 18, 2021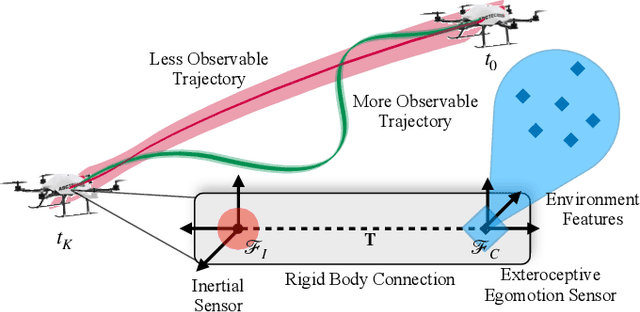

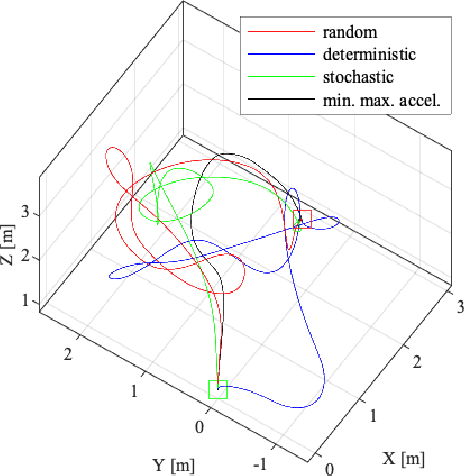
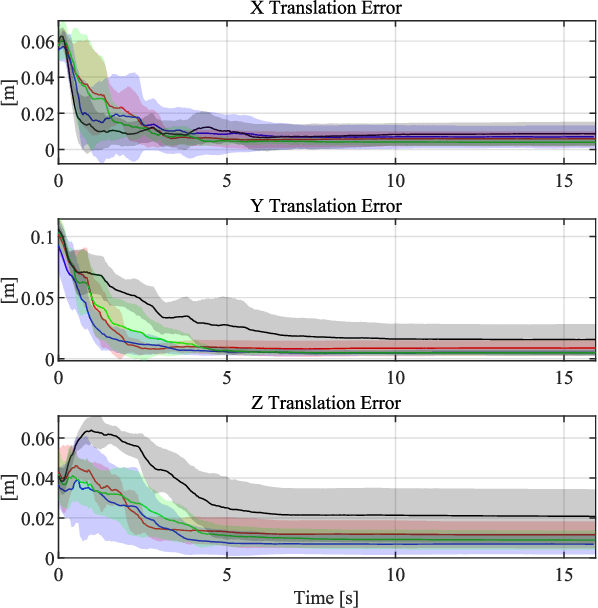
Ideally, robots should move in ways that maximize the knowledge gained about the state of both their internal system and the external operating environment. Trajectory design is a challenging problem that has been investigated from a variety of perspectives, ranging from information-theoretic analyses to leaning-based approaches. Recently, observability-based metrics have been proposed to find trajectories that enable rapid and accurate state and parameter estimation. The viability and efficacy of these methods is not yet well understood in the literature. In this paper, we compare two state-of-the-art methods for observability-aware trajectory optimization and seek to add important theoretical clarifications and valuable discussion about their overall effectiveness. For evaluation, we examine the representative task of sensor-to-sensor extrinsic self-calibration using a realistic physics simulator. We also study the sensitivity of these algorithms to changes in the information content of the exteroceptive sensor measurements.
A Question of Time: Revisiting the Use of Recursive Filtering for Temporal Calibration of Multisensor Systems
Jun 01, 2021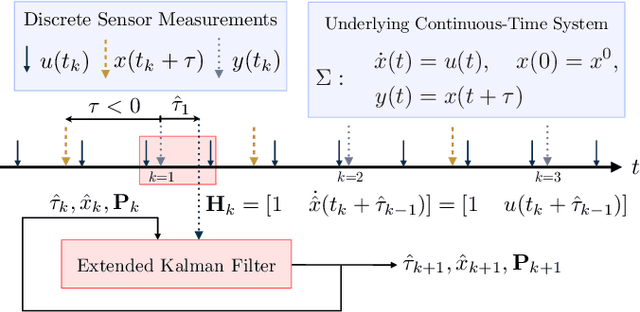
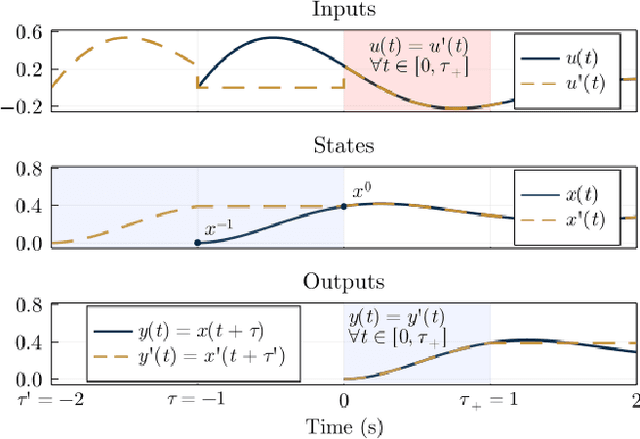
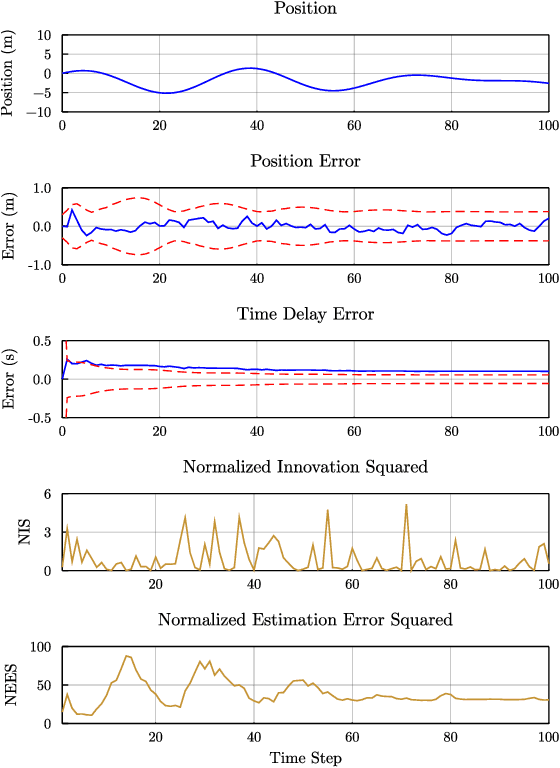
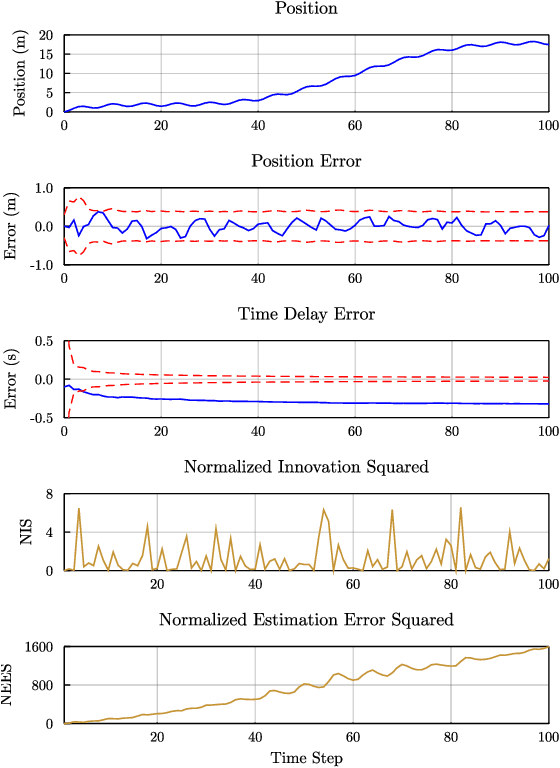
We examine the problem of time delay estimation, or temporal calibration, in the context of multisensor data fusion. Differences in processing intervals and other factors typically lead to a relative delay between measurement from two disparate sensors. Correct (optimal) data fusion demands that the relative delay must either be known in advance or identified online. There have been several recent proposals in the literature to determine the delay parameter using recursive, causal filters such as the extended Kalman filter (EKF). We carefully review this formulation and show that there are fundamental issues with the structure of the EKF (and related algorithms) when the delay is included in the filter state vector as a value to be estimated. These structural issues, in turn, leave recursive filters prone to bias and inconsistency. Our theoretical analysis is supported by simulation studies that demonstrate the implications in terms of filter performance; although tuning of the filter noise variances may reduce the chance of inconsistency or divergence, the underlying structural concerns remain. We offer brief suggestions for ways to maintain the computational efficiency of recursive filtering for temporal calibration while avoiding the drawbacks of the standard algorithms.
Under Pressure: Learning to Detect Slip with Barometric Tactile Sensors
Mar 24, 2021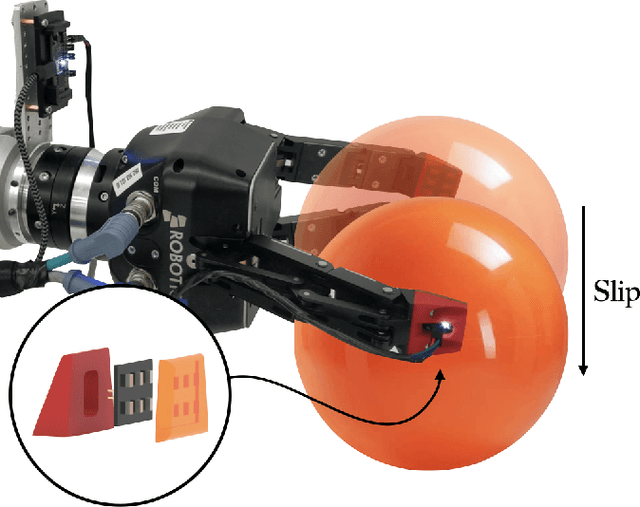
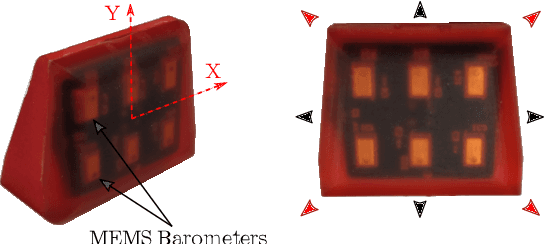

The ability to perceive object slip through tactile feedback allows humans to accomplish complex manipulation tasks including maintaining a stable grasp. Despite the utility of tactile information for many robotics applications, tactile sensors have yet to be widely deployed in industrial settings -- part of the challenge lies in identifying slip and other key events from the tactile data stream. In this paper, we present a learning-based method to detect slip using barometric tactile sensors. These sensors have many desirable properties including high reliability and durability, and are built from very inexpensive components. We are able to achieve slip detection accuracies of greater than 91% while displaying robustness to the speed and direction of the slip motion. Further, we test our detector on two robot manipulation tasks involving a variety of common objects and demonstrate successful generalization to real-world scenarios not seen during training. We show that barometric tactile sensing technology, combined with data-driven learning, is potentially suitable for many complex manipulation tasks such as slip compensation.
A Continuous-Time Approach for 3D Radar-to-Camera Extrinsic Calibration
Mar 12, 2021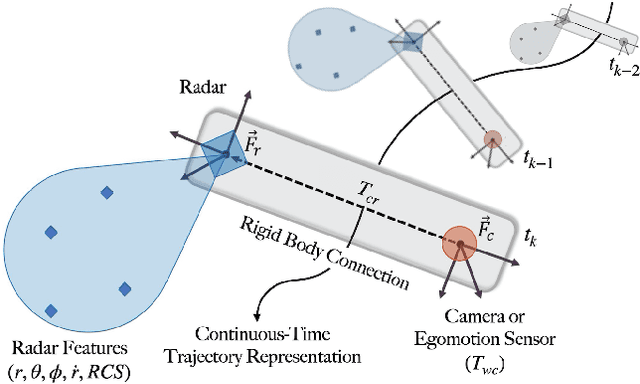
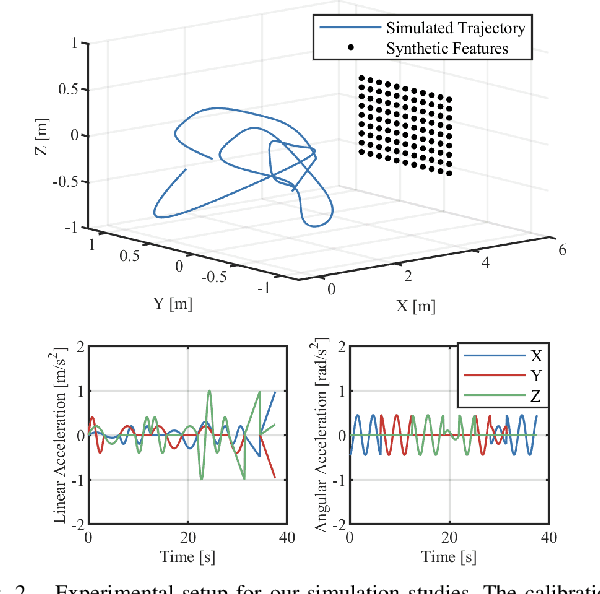
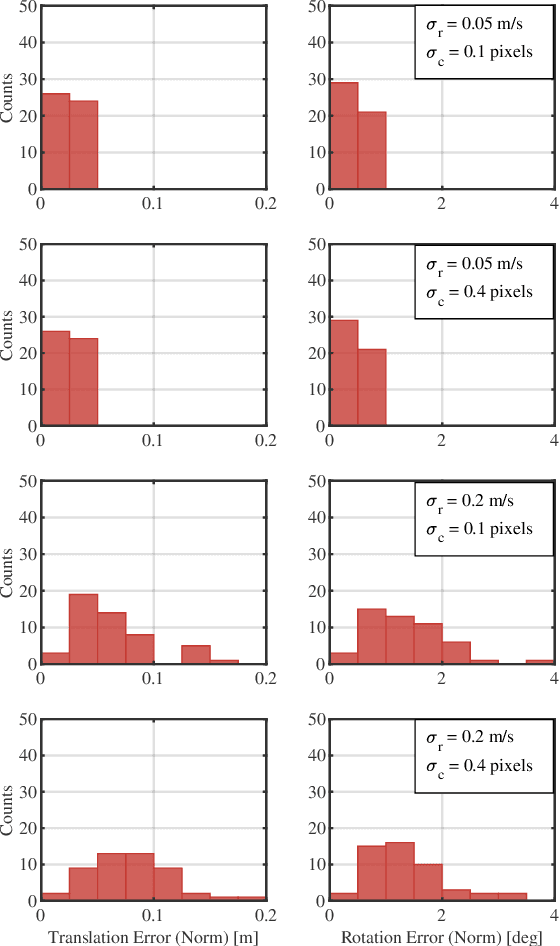
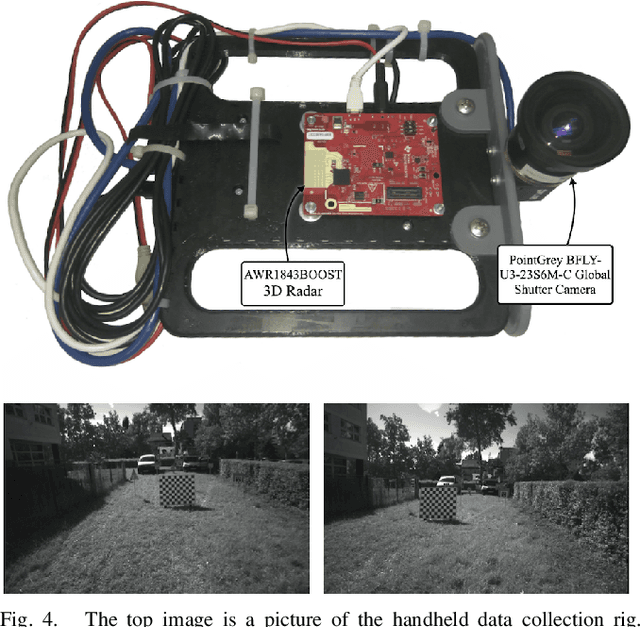
Reliable operation in inclement weather is essential to the deployment of safe autonomous vehicles (AVs). Robustness and reliability can be achieved by fusing data from the standard AV sensor suite (i.e., lidars, cameras) with weather robust sensors, such as millimetre-wavelength radar. Critically, accurate sensor data fusion requires knowledge of the rigid-body transform between sensor pairs, which can be determined through the process of extrinsic calibration. A number of extrinsic calibration algorithms have been designed for 2D (planar) radar sensors - however, recently-developed, low-cost 3D millimetre-wavelength radars are set to displace their 2D counterparts in many applications. In this paper, we present a continuous-time 3D radar-to-camera extrinsic calibration algorithm that utilizes radar velocity measurements and, unlike the majority of existing techniques, does not require specialized radar retroreflectors to be present in the environment. We derive the observability properties of our formulation and demonstrate the efficacy of our algorithm through synthetic and real-world experiments.