 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Question of Time: Revisiting the Use of Recursive Filtering for Temporal Calibration of Multisensor Systems
Paper and Code
Jun 01, 2021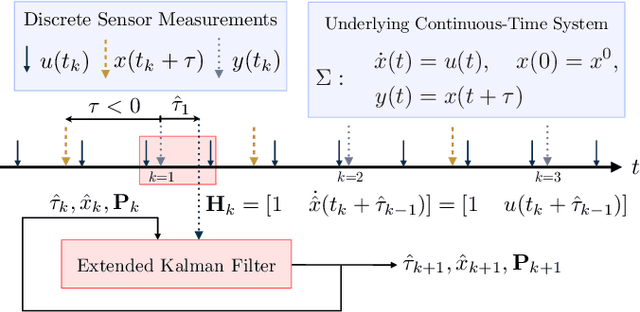
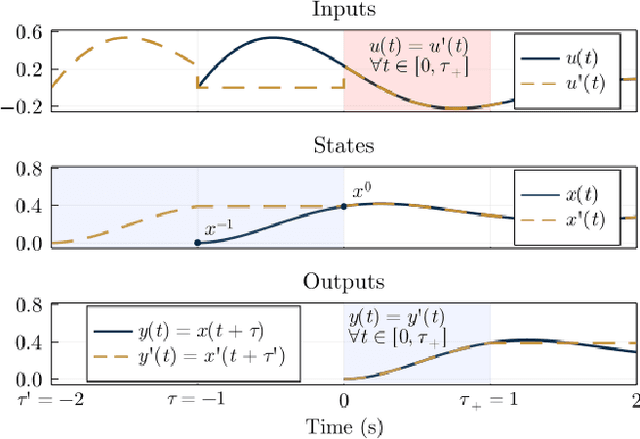
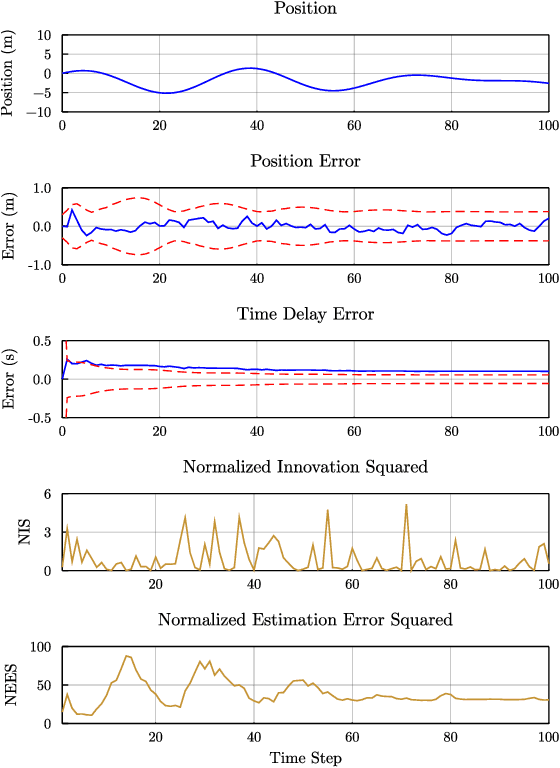
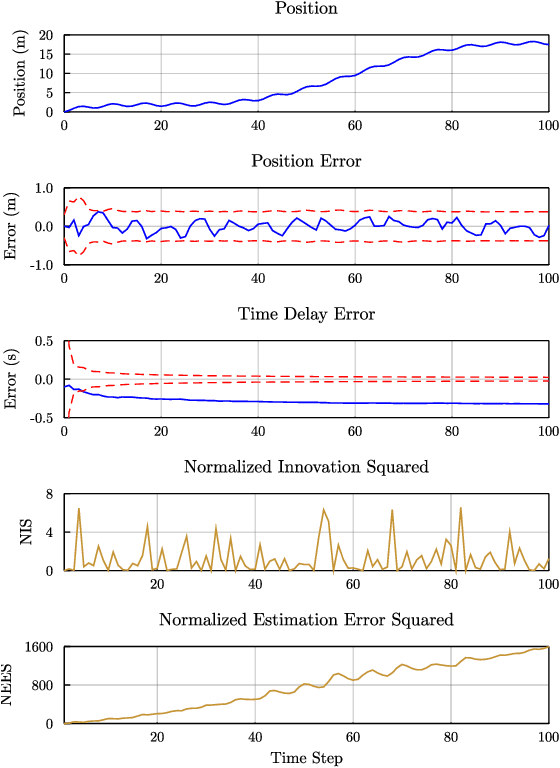
We examine the problem of time delay estimation, or temporal calibration, in the context of multisensor data fusion. Differences in processing intervals and other factors typically lead to a relative delay between measurement from two disparate sensors. Correct (optimal) data fusion demands that the relative delay must either be known in advance or identified online. There have been several recent proposals in the literature to determine the delay parameter using recursive, causal filters such as the extended Kalman filter (EKF). We carefully review this formulation and show that there are fundamental issues with the structure of the EKF (and related algorithms) when the delay is included in the filter state vector as a value to be estimated. These structural issues, in turn, leave recursive filters prone to bias and inconsistency. Our theoretical analysis is supported by simulation studies that demonstrate the implications in terms of filter performance; although tuning of the filter noise variances may reduce the chance of inconsistency or divergence, the underlying structural concerns remain. We offer brief suggestions for ways to maintain the computational efficiency of recursive filtering for temporal calibration while avoiding the drawbacks of the standard algorithms.