 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning the Next Best View for 3D Point Clouds via Topological Features
Mar 22, 2021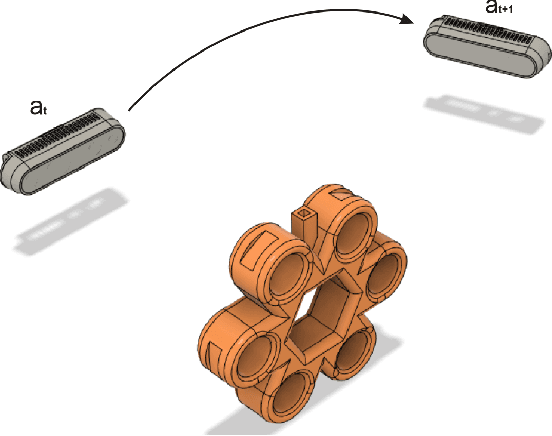
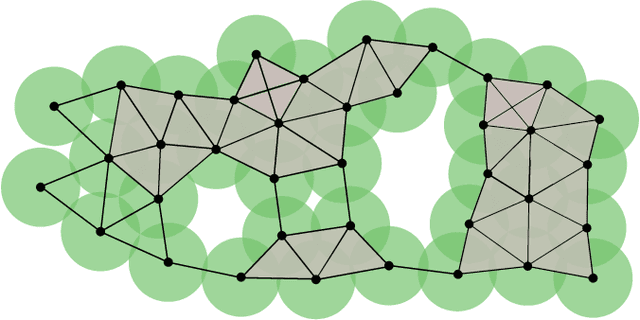
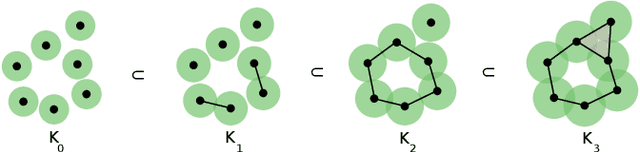
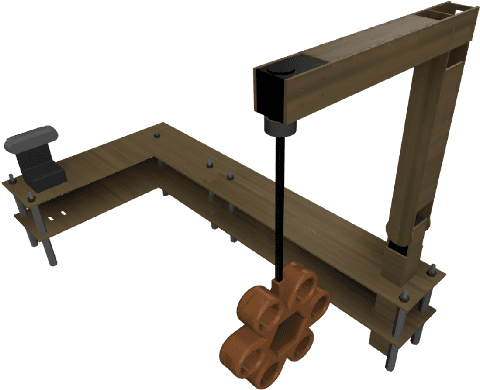
In this paper, we introduce a reinforcement learning approach utilizing a novel topology-based information gain metric for directing the next best view of a noisy 3D sensor. The metric combines the disjoint sections of an observed surface to focus on high-detail features such as holes and concave sections. Experimental results show that our approach can aid in establishing the placement of a robotic sensor to optimize the information provided by its streaming point cloud data. Furthermore, a labeled dataset of 3D objects, a CAD design for a custom robotic manipulator, and software for the transformation, union, and registration of point clouds has been publicly released to the research community.
Camera-Based Adaptive Trajectory Guidance via Neural Networks
Jan 09, 2020
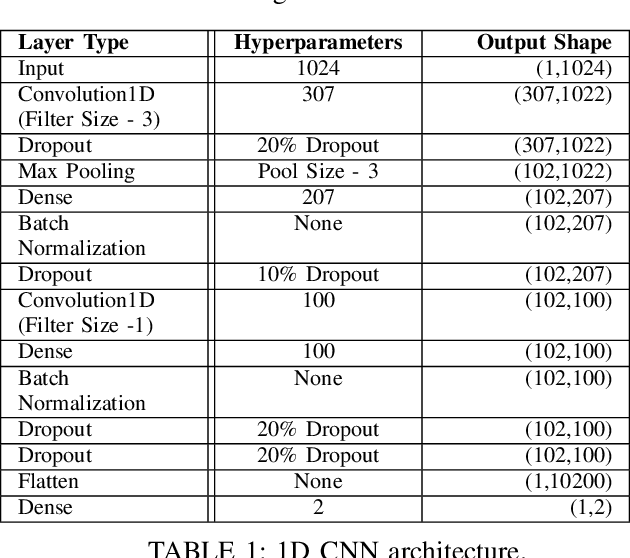

In this paper, we introduce a novel method to capture visual trajectories for navigating an indoor robot in dynamic settings using streaming image data. First, an image processing pipeline is proposed to accurately segment trajectories from noisy backgrounds. Next, the captured trajectories are used to design, train, and compare two neural network architectures for predicting acceleration and steering commands for a line following robot over a continuous space in real time. Lastly, experimental results demonstrate the performance of the neural networks versus human teleoperation of the robot and the viability of the system in environments with occlusions and/or low-light conditions.