Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning the Next Best View for 3D Point Clouds via Topological Features
Paper and Code
Mar 22, 2021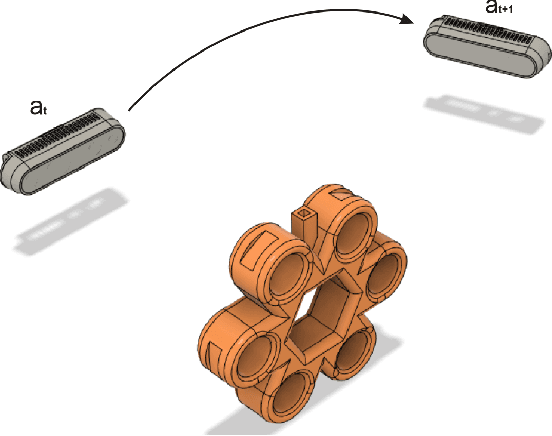
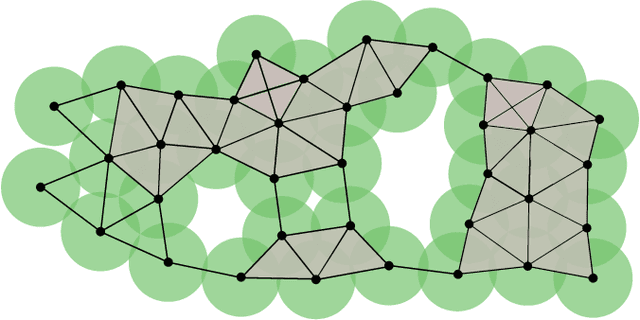
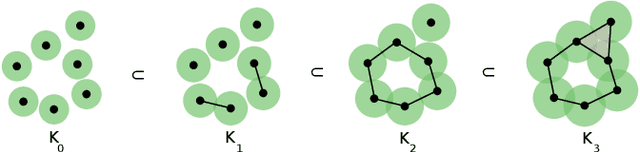
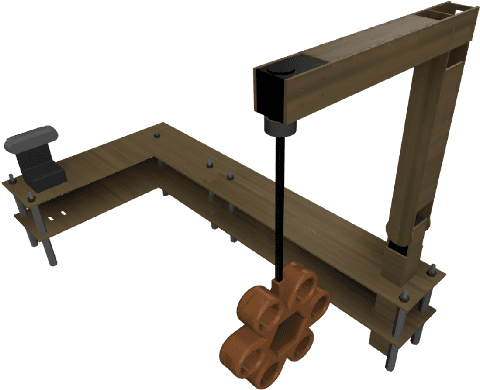
In this paper, we introduce a reinforcement learning approach utilizing a novel topology-based information gain metric for directing the next best view of a noisy 3D sensor. The metric combines the disjoint sections of an observed surface to focus on high-detail features such as holes and concave sections. Experimental results show that our approach can aid in establishing the placement of a robotic sensor to optimize the information provided by its streaming point cloud data. Furthermore, a labeled dataset of 3D objects, a CAD design for a custom robotic manipulator, and software for the transformation, union, and registration of point clouds has been publicly released to the research community.
* To be published in the 2021 IEEE International Conference on Robotics
and Automation (ICRA)
View paper on