 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sensorimotor Vision Transformer
Apr 03, 2025This paper presents the Sensorimotor Transformer (SMT), a vision model inspired by human saccadic eye movements that prioritize high-saliency regions in visual input to enhance computational efficiency and reduce memory consumption. Unlike traditional models that process all image patches uniformly, SMT identifies and selects the most salient patches based on intrinsic two-dimensional (i2D) features, such as corners and occlusions, which are known to convey high-information content and align with human fixation patterns. The SMT architecture uses this biological principle to leverage vision transformers to process only the most informative patches, allowing for a substantial reduction in memory usage that scales with the sequence length of selected patches. This approach aligns with visual neuroscience findings, suggesting that the human visual system optimizes information gathering through selective, spatially dynamic focus. Experimental evaluations on Imagenet-1k demonstrate that SMT achieves competitive top-1 accuracy while significantly reducing memory consumption and computational complexity, particularly when a limited number of patches is used. This work introduces a saccade-like selection mechanism into transformer-based vision models, offering an efficient alternative for image analysis and providing new insights into biologically motivated architectures for resource-constrained applications.
World Knowledge from AI Image Generation for Robot Control
Mar 20, 2025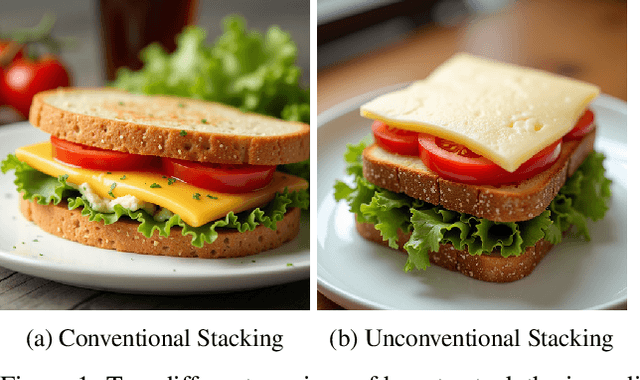


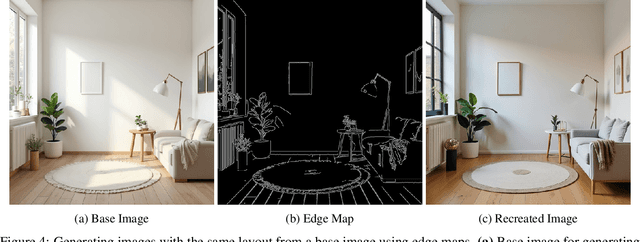
When interacting with the world robots face a number of difficult questions, having to make decisions when given under-specified tasks where they need to make choices, often without clearly defined right and wrong answers. Humans, on the other hand, can often rely on their knowledge and experience to fill in the gaps. For example, the simple task of organizing newly bought produce into the fridge involves deciding where to put each thing individually, how to arrange them together meaningfully, e.g. putting related things together, all while there is no clear right and wrong way to accomplish this task. We could encode all this information on how to do such things explicitly into the robots' knowledge base, but this can quickly become overwhelming, considering the number of potential tasks and circumstances the robot could encounter. However, images of the real world often implicitly encode answers to such questions and can show which configurations of objects are meaningful or are usually used by humans. An image of a full fridge can give a lot of information about how things are usually arranged in relation to each other and the full fridge at large. Modern generative systems are capable of generating plausible images of the real world and can be conditioned on the environment in which the robot operates. Here we investigate the idea of using the implicit knowledge about the world of modern generative AI systems given by their ability to generate convincing images of the real world to solve under-specified tasks.
Robot Pouring: Identifying Causes of Spillage and Selecting Alternative Action Parameters Using Probabilistic Actual Causation
Feb 13, 2025In everyday life, we perform tasks (e.g., cooking or cleaning) that involve a large variety of objects and goals. When confronted with an unexpected or unwanted outcome, we take corrective actions and try again until achieving the desired result. The reasoning performed to identify a cause of the observed outcome and to select an appropriate corrective action is a crucial aspect of human reasoning for successful task execution. Central to this reasoning is the assumption that a factor is responsible for producing the observed outcome. In this paper, we investigate the use of probabilistic actual causation to determine whether a factor is the cause of an observed undesired outcome. Furthermore, we show how the actual causation probabilities can be used to find alternative actions to change the outcome. We apply the probabilistic actual causation analysis to a robot pouring task. When spillage occurs, the analysis indicates whether a task parameter is the cause and how it should be changed to avoid spillage. The analysis requires a causal graph of the task and the corresponding conditional probability distributions. To fulfill these requirements, we perform a complete causal modeling procedure (i.e., task analysis, definition of variables, determination of the causal graph structure, and estimation of conditional probability distributions) using data from a realistic simulation of the robot pouring task, covering a large combinatorial space of task parameters. Based on the results, we discuss the implications of the variables' representation and how the alternative actions suggested by the actual causation analysis would compare to the alternative solutions proposed by a human observer. The practical use of the analysis of probabilistic actual causation to select alternative action parameters is demonstrated.
Identification of Prototypical Task Executions Based on Smoothness as Basis of Human-to-Robot Kinematic Skill Transfer
Dec 03, 2020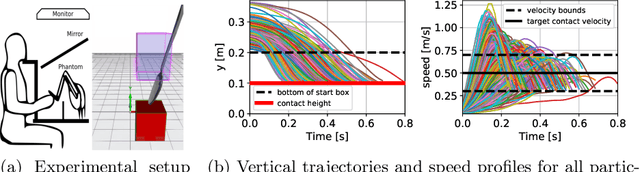
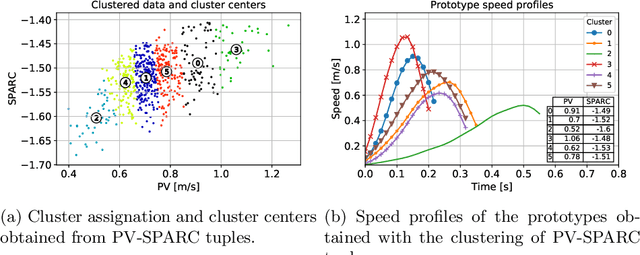
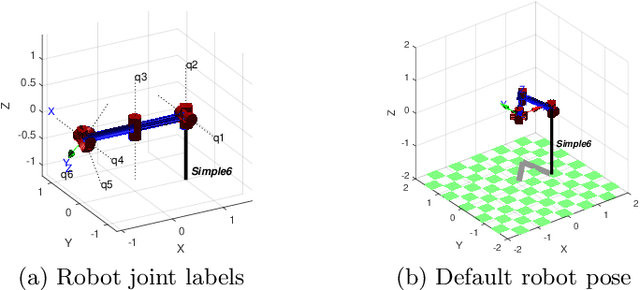
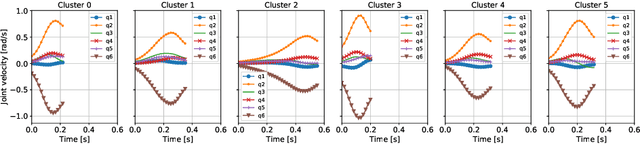
In this paper we investigate human-to-robot skill transfer based on the identification of prototypical task executions by clustering a set of examples performed by human demonstrators, where smoothness and kinematic features represent skill and task performance, respectively. We exemplify our skill transfer approach with data from an experimental task in which a tool touches a support surface with a target velocity. Prototypical task executions are identified and transferred to a generic robot arm in simulation. The results illustrate how task models based on skill and performance features can provide analysis and design criteria for robotic applications.
Multimodal Contact Detection using Auditory and Force Features for Reliable Object Placing in Household Environments
Dec 02, 2020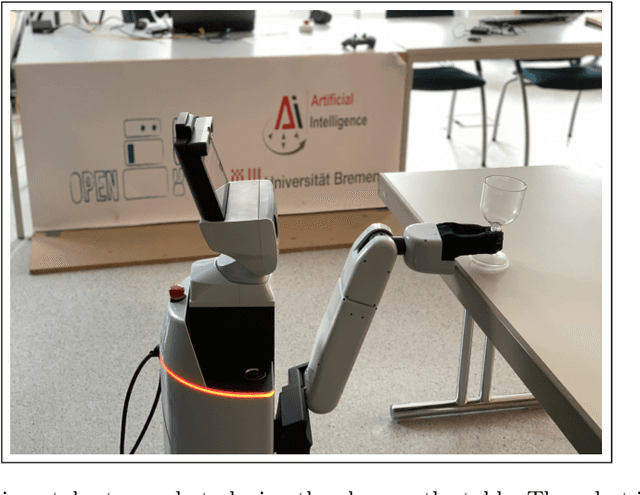
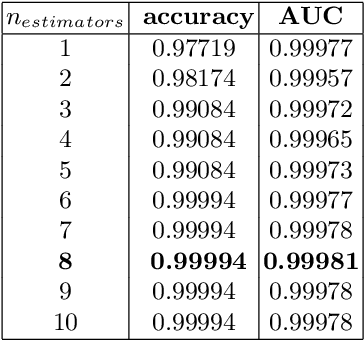
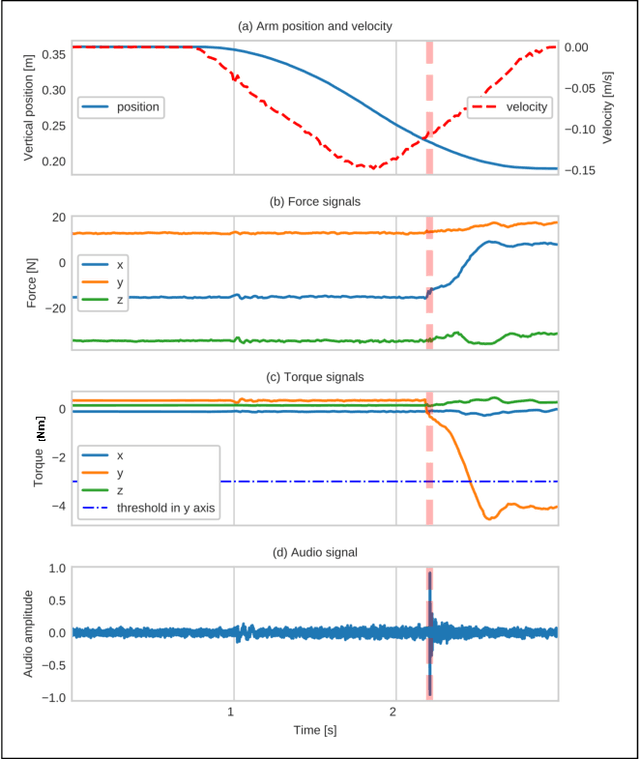
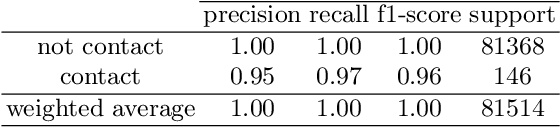
Typical contact detection is based on the monitoring of a threshold value in the force and torque signals. The selection of a threshold is challenging for robots operating in unstructured or highly dynamic environments, such in a household setting, due to the variability of the characteristics of the objects that might be encountered. We propose a multimodal contact detection approach using time and frequency domain features which model the distinctive characteristics of contact events in the auditory and haptic modalities. In our approach the monitoring of force and torque thresholds is not necessary as detection is based on the characteristics of force and torque signals in the frequency domain together with the impact sound generated by the manipulation task. We evaluated our approach with a typical glass placing task in a household setting. Our experimental results show that robust contact detection (99.94% mean cross-validation accuracy) is possible independent of force/torque threshold values and suitable of being implemented for operation in highly dynamic scenarios.
SideEye: A Generative Neural Network Based Simulator of Human Peripheral Vision
Oct 23, 2017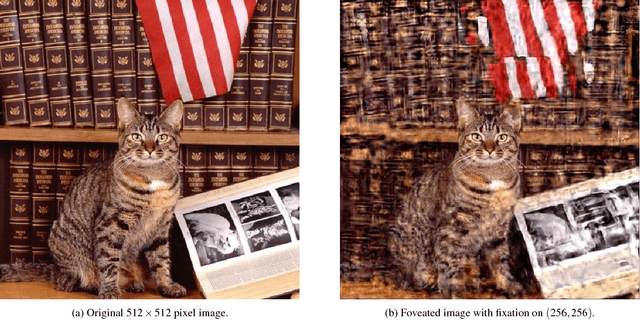
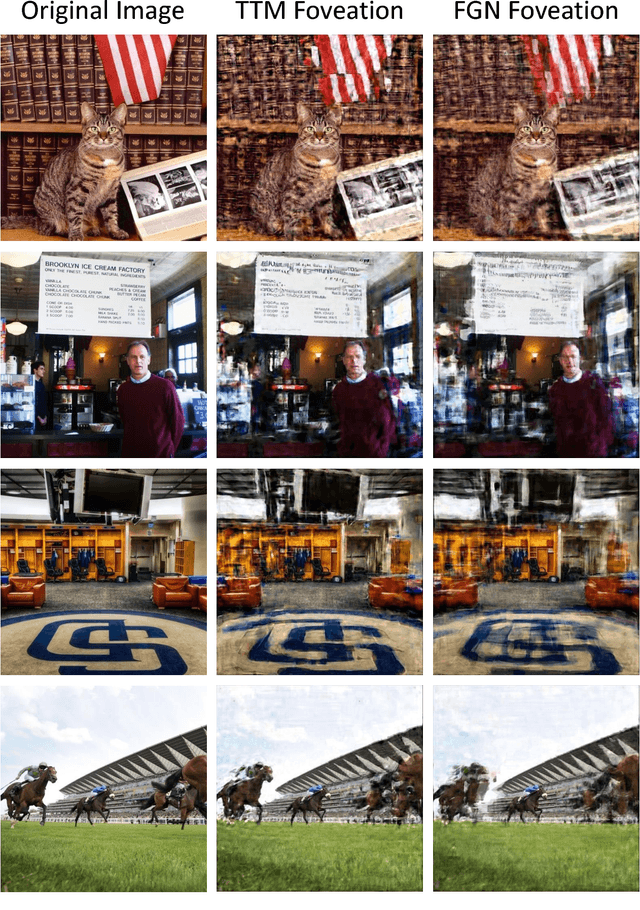

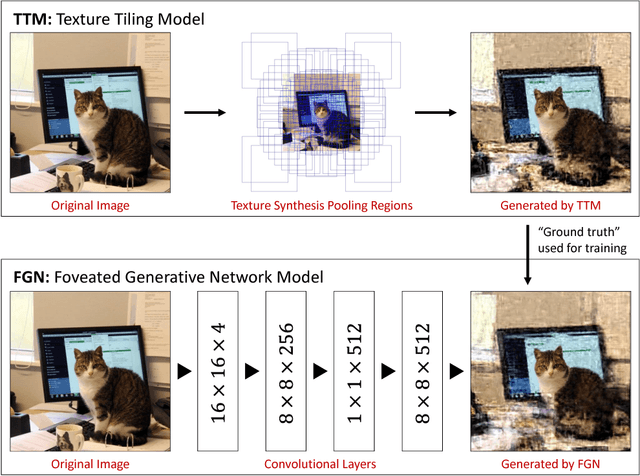
Foveal vision makes up less than 1% of the visual field. The other 99% is peripheral vision. Precisely what human beings see in the periphery is both obvious and mysterious in that we see it with our own eyes but can't visualize what we see, except in controlled lab experiments. Degradation of information in the periphery is far more complex than what might be mimicked with a radial blur. Rather, behaviorally-validated models hypothesize that peripheral vision measures a large number of local texture statistics in pooling regions that overlap and grow with eccentricity. In this work, we develop a new method for peripheral vision simulation by training a generative neural network on a behaviorally-validated full-field synthesis model. By achieving a 21,000 fold reduction in running time, our approach is the first to combine realism and speed of peripheral vision simulation to a degree that provides a whole new way to approach visual design: through peripheral visualization.
Completing Knowledge by Competing Hierarchies
Mar 20, 2013A control strategy for expert systems is presented which is based on Shafer's Belief theory and the combination rule of Dempster. In contrast to well known strategies it is not sequentially and hypotheses-driven, but parallel and self organizing, determined by the concept of information gain. The information gain, calculated as the maximal difference between the actual evidence distribution in the knowledge base and the potential evidence determines each consultation step. Hierarchically structured knowledge is an important representation form and experts even use several hierarchies in parallel for constituting their knowledge. Hence the control strategy is applied to a layered set of distinct hierarchies. Depending on the actual data one of these hierarchies is chosen by the control strategy for the next step in the reasoning process. Provided the actual data are well matched to the structure of one hierarchy, this hierarchy remains selected for a longer consultation time. If no good match can be achieved, a switch from the actual hierarchy to a competing one will result, very similar to the phenomenon of restructuring in problem solving tasks. Up to now the control strategy is restricted to multi hierarchical knowledge bases with disjunct hierarchies. It is implemented in the expert system IBIG (inference by information gain), being presently applied to acquired speech disorders (aphasia).