 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Pouring: Identifying Causes of Spillage and Selecting Alternative Action Parameters Using Probabilistic Actual Causation
Feb 13, 2025In everyday life, we perform tasks (e.g., cooking or cleaning) that involve a large variety of objects and goals. When confronted with an unexpected or unwanted outcome, we take corrective actions and try again until achieving the desired result. The reasoning performed to identify a cause of the observed outcome and to select an appropriate corrective action is a crucial aspect of human reasoning for successful task execution. Central to this reasoning is the assumption that a factor is responsible for producing the observed outcome. In this paper, we investigate the use of probabilistic actual causation to determine whether a factor is the cause of an observed undesired outcome. Furthermore, we show how the actual causation probabilities can be used to find alternative actions to change the outcome. We apply the probabilistic actual causation analysis to a robot pouring task. When spillage occurs, the analysis indicates whether a task parameter is the cause and how it should be changed to avoid spillage. The analysis requires a causal graph of the task and the corresponding conditional probability distributions. To fulfill these requirements, we perform a complete causal modeling procedure (i.e., task analysis, definition of variables, determination of the causal graph structure, and estimation of conditional probability distributions) using data from a realistic simulation of the robot pouring task, covering a large combinatorial space of task parameters. Based on the results, we discuss the implications of the variables' representation and how the alternative actions suggested by the actual causation analysis would compare to the alternative solutions proposed by a human observer. The practical use of the analysis of probabilistic actual causation to select alternative action parameters is demonstrated.
Identification of Prototypical Task Executions Based on Smoothness as Basis of Human-to-Robot Kinematic Skill Transfer
Dec 03, 2020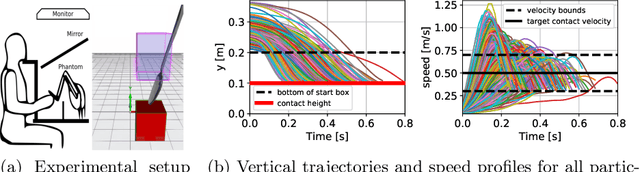
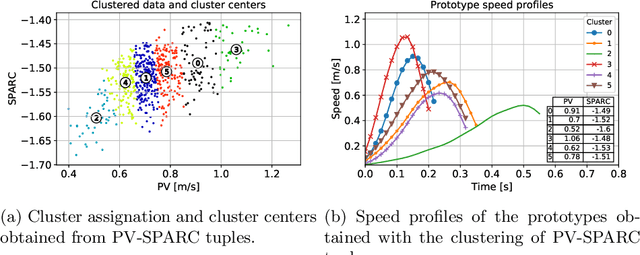
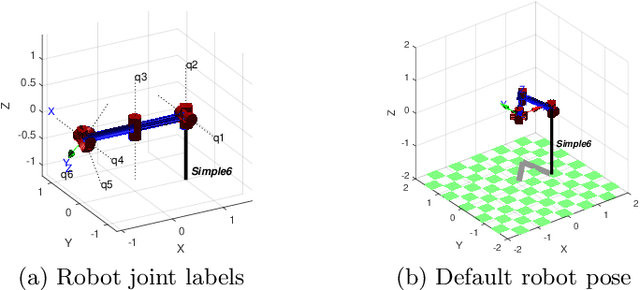
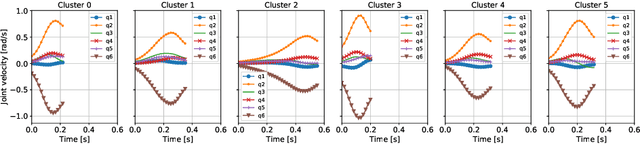
In this paper we investigate human-to-robot skill transfer based on the identification of prototypical task executions by clustering a set of examples performed by human demonstrators, where smoothness and kinematic features represent skill and task performance, respectively. We exemplify our skill transfer approach with data from an experimental task in which a tool touches a support surface with a target velocity. Prototypical task executions are identified and transferred to a generic robot arm in simulation. The results illustrate how task models based on skill and performance features can provide analysis and design criteria for robotic applications.
Multimodal Contact Detection using Auditory and Force Features for Reliable Object Placing in Household Environments
Dec 02, 2020
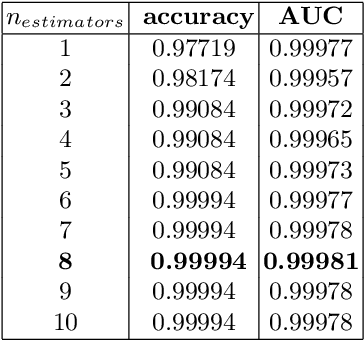
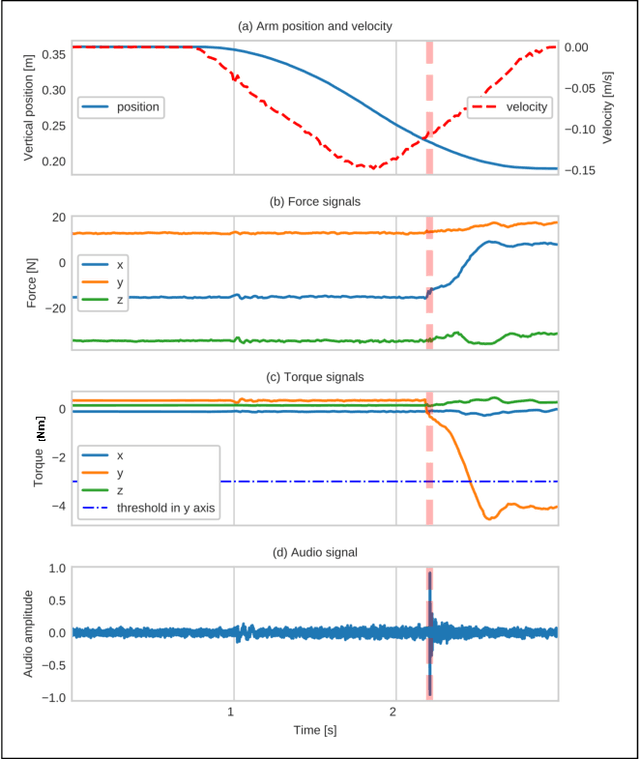
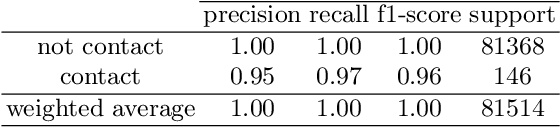
Typical contact detection is based on the monitoring of a threshold value in the force and torque signals. The selection of a threshold is challenging for robots operating in unstructured or highly dynamic environments, such in a household setting, due to the variability of the characteristics of the objects that might be encountered. We propose a multimodal contact detection approach using time and frequency domain features which model the distinctive characteristics of contact events in the auditory and haptic modalities. In our approach the monitoring of force and torque thresholds is not necessary as detection is based on the characteristics of force and torque signals in the frequency domain together with the impact sound generated by the manipulation task. We evaluated our approach with a typical glass placing task in a household setting. Our experimental results show that robust contact detection (99.94% mean cross-validation accuracy) is possible independent of force/torque threshold values and suitable of being implemented for operation in highly dynamic scenarios.