 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRT-Pose: A 4D Radar Tensor-based 3D Human Pose Estimation and Localization Benchmark
Jul 18, 2024
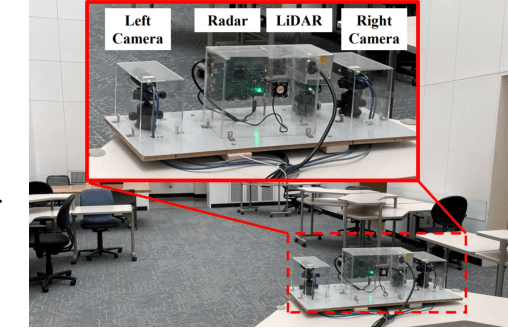
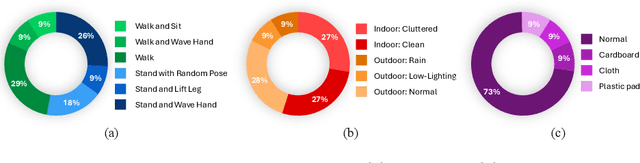

Traditional methods for human localization and pose estimation (HPE), which mainly rely on RGB images as an input modality, confront substantial limitations in real-world applications due to privacy concerns. In contrast, radar-based HPE methods emerge as a promising alternative, characterized by distinctive attributes such as through-wall recognition and privacy-preserving, rendering the method more conducive to practical deployments. This paper presents a Radar Tensor-based human pose (RT-Pose) dataset and an open-source benchmarking framework. The RT-Pose dataset comprises 4D radar tensors, LiDAR point clouds, and RGB images, and is collected for a total of 72k frames across 240 sequences with six different complexity-level actions. The 4D radar tensor provides raw spatio-temporal information, differentiating it from other radar point cloud-based datasets. We develop an annotation process using RGB images and LiDAR point clouds to accurately label 3D human skeletons. In addition, we propose HRRadarPose, the first single-stage architecture that extracts the high-resolution representation of 4D radar tensors in 3D space to aid human keypoint estimation. HRRadarPose outperforms previous radar-based HPE work on the RT-Pose benchmark. The overall HRRadarPose performance on the RT-Pose dataset, as reflected in a mean per joint position error (MPJPE) of 9.91cm, indicates the persistent challenges in achieving accurate HPE in complex real-world scenarios. RT-Pose is available at https://huggingface.co/datasets/uwipl/RT-Pose.