 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLayered Graph Embedding for Entity Recommendation using Wikipedia in the Yahoo! Knowledge Graph
Apr 15, 2020
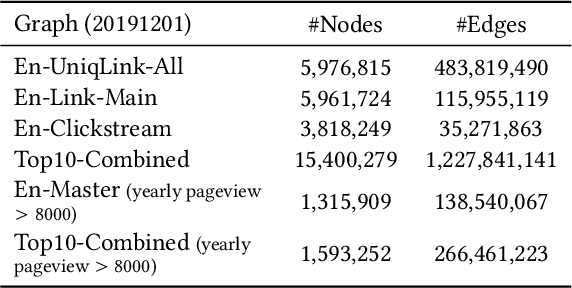
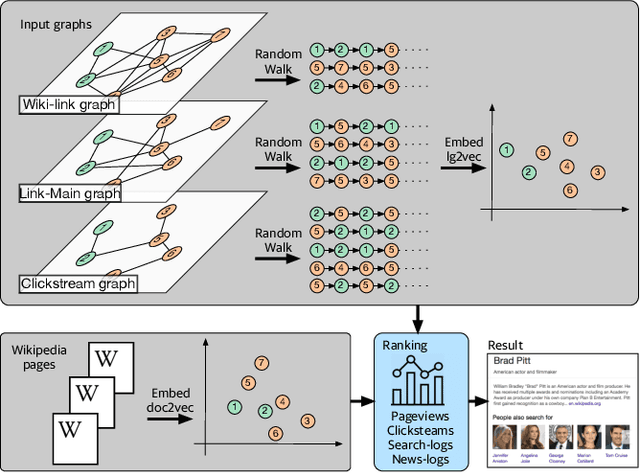
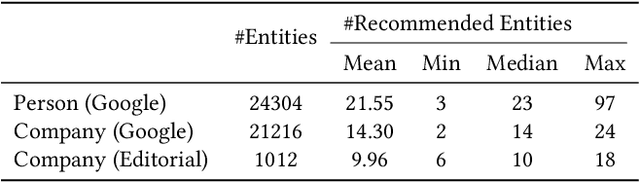
In this paper, we describe an embedding-based entity recommendation framework for Wikipedia that organizes Wikipedia into a collection of graphs layered on top of each other, learns complementary entity representations from their topology and content, and combines them with a lightweight learning-to-rank approach to recommend related entities on Wikipedia. Through offline and online evaluations, we show that the resulting embeddings and recommendations perform well in terms of quality and user engagement. Balancing simplicity and quality, this framework provides default entity recommendations for English and other languages in the Yahoo! Knowledge Graph, which Wikipedia is a core subset of.
Topology Based Scalable Graph Kernels
Jul 15, 2019
We propose a new graph kernel for graph classification and comparison using Ollivier Ricci curvature. The Ricci curvature of an edge in a graph describes the connectivity in the local neighborhood. An edge in a densely connected neighborhood has positive curvature and an edge serving as a local bridge has negative curvature. We use the edge curvature distribution to form a graph kernel which is then used to compare and cluster graphs. The curvature kernel uses purely the graph topology and thereby works for settings when node attributes are not available.
Robot Coverage Path Planning for General Surfaces Using Quadratic Differentials
Jan 26, 2017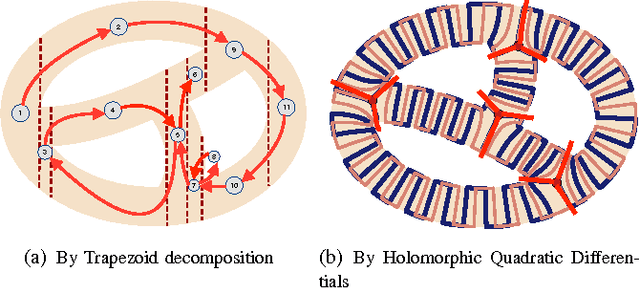
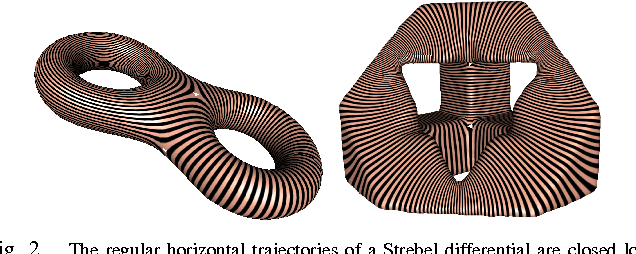
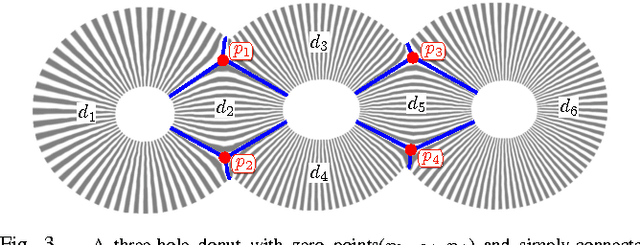
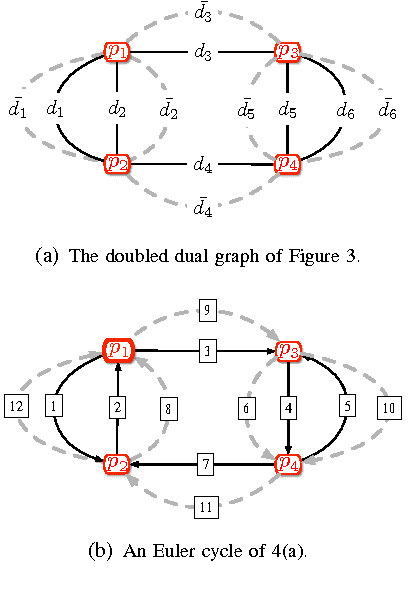
Robot Coverage Path planning (i.e., provide full coverage of a given domain by one or multiple robots) is a classical problem in the field of robotics and motion planning. The goal is to provide nearly full coverage while also minimize duplicately visited area. In this paper we focus on the scenario of path planning on general surfaces including planar domains with complex topology, complex terrain or general surface in 3D space. The main idea is to adopt a natural, intrinsic and global parametrization of the surface for robot path planning, namely the holomorphic quadratic differentials. Except for a small number of zero points (singularities), each point on the surface is given a uv-coordinates naturally represented by a complex number. We show that natural, efficient robot paths can be obtained by using such coordinate systems. The method is based on intrinsic geometry and thus can be adapted to general surface exploration in 3D.