 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Physical Human-Robot Interaction to Provide a Unique Rolling Experience with a Riding Ballbot
Sep 27, 2024This study introduces the development of hands-free control schemes for a riding ballbot, designed to allow riders including manual wheelchair users to control its movement through torso leaning and twisting. The hardware platform, Personal Unique Rolling Experience (PURE), utilizes a ballbot drivetrain, a dynamically stable mobile robot that uses a ball as its wheel to provide omnidirectional maneuverability. To accommodate users with varying torso motion functions, the hanads-free control scheme should be adjustable based on the rider's torso function and personal preferences. Therefore, concepts of (a) impedance control and (b) admittance control were integrated into the control scheme. A duo-agent optimization framework was utilized to assess the efficiency of this rider-ballbot system for a safety-critical task: braking from 1.4 m/s. The candidate control schemes were further implemented in the physical robot hardware and validated with two experienced users, demonstrating the efficiency and robustness of the hands-free admittance control scheme (HACS). This interface, which utilized physical human-robot interaction (pHRI) as the input, resulted in lower braking effort and shorter braking distance and time. Subsequently, 12 novice participants (six able-bodied users and six manual wheelchair users) with different levels of torso motion capability were then recruited to benchmark the braking performance with HACS. The indoor navigation capability of PURE was further demonstrated with these participants in courses simulating narrow hallways, tight turns, and navigation through static and dynamic obstacles. By exploiting pHRI, the proposed admittance-style control scheme provided effective control of the ballbot via torso motions. This interface enables PURE to provide a personal unique rolling experience to manual wheelchair users for safe and agile indoor navigation.
An Interactive Hands-Free Controller for a Riding Ballbot to Enable Simple Shared Control Tasks
Sep 27, 2024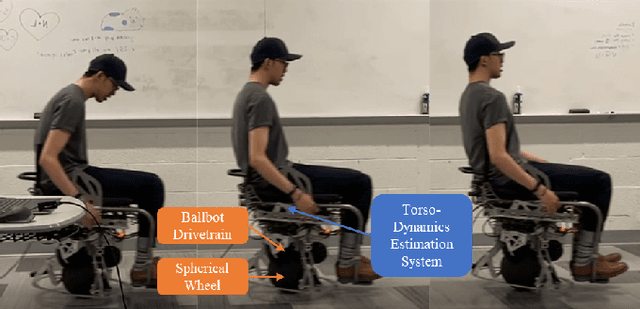
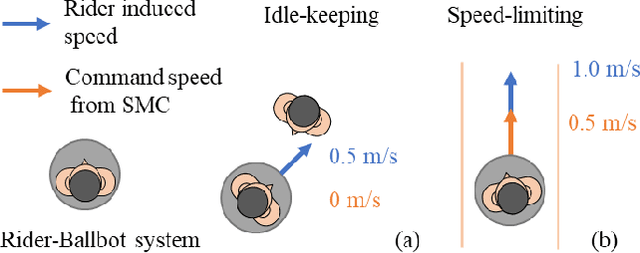
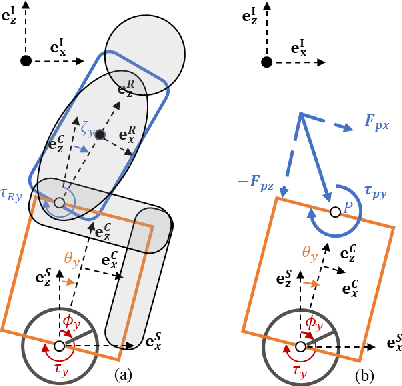
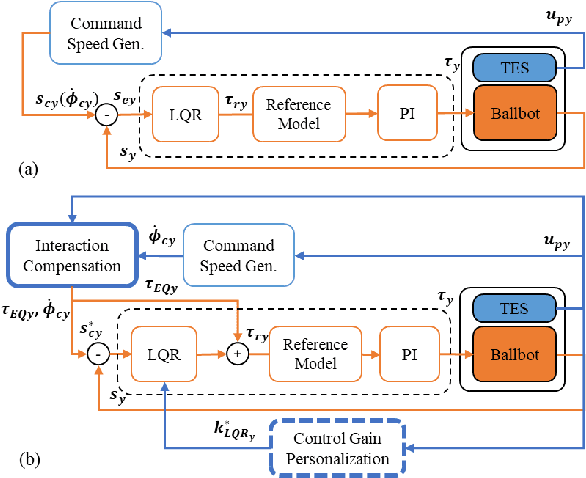
Our team developed a riding ballbot (called PURE) that is dynamically stable, omnidirectional, and driven by lean-to-steer control. A hands-free admittance control scheme (HACS) was previously integrated to allow riders with different torso functions to control the robot's movements via torso leaning and twisting. Such an interface requires motor coordination skills and could result in collisions with obstacles due to low proficiency. Hence, a shared controller (SC) that limits the speed of PURE could be helpful to ensure the safety of riders. However, the self-balancing dynamics of PURE could result in a weak control authority of its motion, in which the torso motion of the rider could easily result in poor tracking of the command speed dictated by the shared controller. Thus, we proposed an interactive hands-free admittance control scheme (iHACS), which added two modules to HACS to improve the speed-tracking performance of PURE: control gain personalization module and interaction compensation module. Human riding tests of simple tasks, idle-keeping and speed-limiting, were conducted to compare the performance of HACS and iHACS. Two manual wheelchair users and two able-bodied individuals participated in this study. They were instructed to use "adversarial" torso motions that would tax the SC's ability to keep the ballbot idling or below a set speed. In the idle-keeping tasks, iHACS demonstrated minimal translational motion and low command speed tracking RMSE, even with significant torso lean angles. During the speed-limiting task with command speed saturated at 0.5 m/s, the system achieved an average maximum speed of 1.1 m/s with iHACS, compared with that of over 1.9 m/s with HACS. These results suggest that iHACS can enhance PURE's control authority over the rider, which enables PURE to provide physical interactions back to the rider and results in a collaborative rider-robot synergy.
Enabling Shared-Control for A Riding Ballbot System
Sep 11, 2024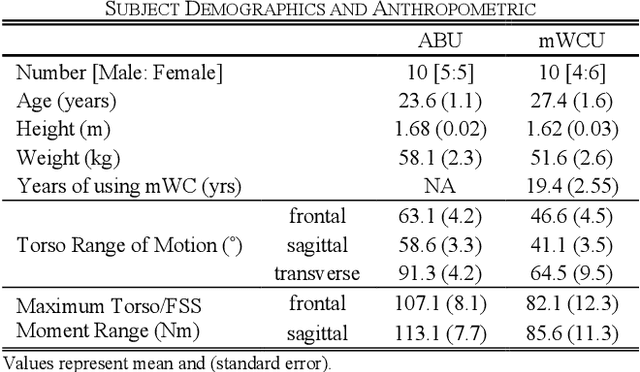
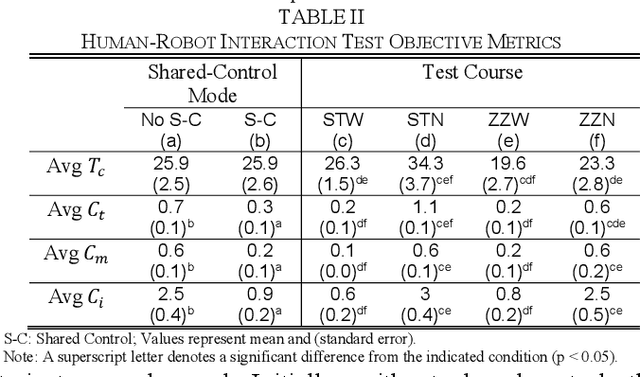
This study introduces a shared-control approach for collision avoidance in a self-balancing riding ballbot, called PURE, marked by its dynamic stability, omnidirectional movement, and hands-free interface. Integrated with a sensor array and a novel Passive Artificial Potential Field (PAPF) method, PURE provides intuitive navigation with deceleration assistance and haptic/audio feedback, effectively mitigating collision risks. This approach addresses the limitations of traditional APF methods, such as control oscillations and unnecessary speed reduction in challenging scenarios. A human-robot interaction experiment, with 20 manual wheelchair users and able-bodied individuals, was conducted to evaluate the performance of indoor navigation and obstacle avoidance with the proposed shared-control algorithm. Results indicated that shared-control significantly reduced collisions and cognitive load without affecting travel speed, offering intuitive and safe operation. These findings highlight the shared-control system's suitability for enhancing collision avoidance in self-balancing mobility devices, a relatively unexplored area in assistive mobility research.
Design and Control of a Ballbot Drivetrain with High Agility, Minimal Footprint, and High Payload
Apr 06, 2023



This paper presents the design and control of a ballbot drivetrain that aims to achieve high agility, minimal footprint, and high payload capacity while maintaining dynamic stability. Two hardware platforms and analytical models were developed to test design and control methodologies. The full-scale ballbot prototype (MiaPURE) was constructed using off-the-shelf components and designed to have agility, footprint, and balance similar to that of a walking human. The planar inverted pendulum testbed (PIPTB) was developed as a reduced-order testbed for quick validation of system performance. We then proposed a simple yet robust LQR-PI controller to balance and maneuver the ballbot drivetrain with a heavy payload. This is crucial because the drivetrain is often subject to high stiction due to elastomeric components in the torque transmission system. This controller was first tested in the PIPTB to compare with traditional LQR and cascaded PI-PD controllers, and then implemented in the ballbot drivetrain. The MiaPURE drivetrain was able to carry a payload of 60 kg, achieve a maximum speed of 2.3 m/s, and come to a stop from a speed of 1.4 m/s in 2 seconds in a selected translation direction. Finally, we demonstrated the omnidirectional movement of the ballbot drivetrain in an indoor environment as a payload-carrying robot and a human-riding mobility device. Our experiments demonstrated the feasibility of using the ballbot drivetrain as a universal mobility platform with agile movements, minimal footprint, and high payload capacity using our proposed design and control methodologies.