 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAligning Microscopic Vehicle and Macroscopic Traffic Statistics: Reconstructing Driving Behavior from Partial Data
Jan 29, 2026A driving algorithm that aligns with good human driving practices, or at the very least collaborates effectively with human drivers, is crucial for developing safe and efficient autonomous vehicles. In practice, two main approaches are commonly adopted: (i) supervised or imitation learning, which requires comprehensive naturalistic driving data capturing all states that influence a vehicle's decisions and corresponding actions, and (ii) reinforcement learning (RL), where the simulated driving environment either matches or is intentionally more challenging than real-world conditions. Both methods depend on high-quality observations of real-world driving behavior, which are often difficult and costly to obtain. State-of-the-art sensors on individual vehicles can gather microscopic data, but they lack context about the surrounding conditions. Conversely, roadside sensors can capture traffic flow and other macroscopic characteristics, but they cannot associate this information with individual vehicles on a microscopic level. Motivated by this complementarity, we propose a framework that reconstructs unobserved microscopic states from macroscopic observations, using microscopic data to anchor observed vehicle behaviors, and learns a shared policy whose behavior is microscopically consistent with the partially observed trajectories and actions and macroscopically aligned with target traffic statistics when deployed population-wide. Such constrained and regularized policies promote realistic flow patterns and safe coordination with human drivers at scale.
An Uncertainty-Weighted Decision Transformer for Navigation in Dense, Complex Driving Scenarios
Sep 16, 2025Autonomous driving in dense, dynamic environments requires decision-making systems that can exploit both spatial structure and long-horizon temporal dependencies while remaining robust to uncertainty. This work presents a novel framework that integrates multi-channel bird's-eye-view occupancy grids with transformer-based sequence modeling for tactical driving in complex roundabout scenarios. To address the imbalance between frequent low-risk states and rare safety-critical decisions, we propose the Uncertainty-Weighted Decision Transformer (UWDT). UWDT employs a frozen teacher transformer to estimate per-token predictive entropy, which is then used as a weight in the student model's loss function. This mechanism amplifies learning from uncertain, high-impact states while maintaining stability across common low-risk transitions. Experiments in a roundabout simulator, across varying traffic densities, show that UWDT consistently outperforms other baselines in terms of reward, collision rate, and behavioral stability. The results demonstrate that uncertainty-aware, spatial-temporal transformers can deliver safer and more efficient decision-making for autonomous driving in complex traffic environments.
Bootstrapping Reinforcement Learning with Sub-optimal Policies for Autonomous Driving
Sep 04, 2025Automated vehicle control using reinforcement learning (RL) has attracted significant attention due to its potential to learn driving policies through environment interaction. However, RL agents often face training challenges in sample efficiency and effective exploration, making it difficult to discover an optimal driving strategy. To address these issues, we propose guiding the RL driving agent with a demonstration policy that need not be a highly optimized or expert-level controller. Specifically, we integrate a rule-based lane change controller with the Soft Actor Critic (SAC) algorithm to enhance exploration and learning efficiency. Our approach demonstrates improved driving performance and can be extended to other driving scenarios that can similarly benefit from demonstration-based guidance.
Real-Time Safe Bipedal Robot Navigation using Linear Discrete Control Barrier Functions
Nov 06, 2024Safe navigation in real-time is an essential task for humanoid robots in real-world deployment. Since humanoid robots are inherently underactuated thanks to unilateral ground contacts, a path is considered safe if it is obstacle-free and respects the robot's physical limitations and underlying dynamics. Existing approaches often decouple path planning from gait control due to the significant computational challenge caused by the full-order robot dynamics. In this work, we develop a unified, safe path and gait planning framework that can be evaluated online in real-time, allowing the robot to navigate clustered environments while sustaining stable locomotion. Our approach uses the popular Linear Inverted Pendulum (LIP) model as a template model to represent walking dynamics. It incorporates heading angles in the model to evaluate kinematic constraints essential for physically feasible gaits properly. In addition, we leverage discrete control barrier functions (DCBF) for obstacle avoidance, ensuring that the subsequent foot placement provides a safe navigation path within clustered environments. To guarantee real-time computation, we use a novel approximation of the DCBF to produce linear DCBF (LDCBF) constraints. We validate the proposed approach in simulation using a Digit robot in randomly generated environments. The results demonstrate that our approach can generate safe gaits for a non-trivial humanoid robot to navigate environments with randomly generated obstacles in real-time.
Unified Path and Gait Planning for Safe Bipedal Robot Navigation
Mar 26, 2024Safe path and gait planning are essential for bipedal robots to navigate complex real-world environments. The prevailing approaches often plan the path and gait separately in a hierarchical fashion, potentially resulting in unsafe movements due to neglecting the physical constraints of walking robots. A safety-critical path must not only avoid obstacles but also ensure that the robot's gaits are subject to its dynamic and kinematic constraints. This work presents a novel approach that unifies path planning and gait planning via a Model Predictive Control (MPC) using the Linear Inverted Pendulum (LIP) model representing bipedal locomotion. This approach considers environmental constraints, such as obstacles, and the robot's kinematics and dynamics constraints. By using discrete-time Control Barrier Functions for obstacle avoidance, our approach generates the next foot landing position, ensuring robust walking gaits and a safe navigation path within clustered environments. We validated our proposed approach in simulation using a Digit robot in 20 randomly created environments. The results demonstrate improved performance in terms of safety and robustness when compared to hierarchical path and gait planning frameworks.
Safe Path Planning for Polynomial Shape Obstacles via Control Barrier Functions and Logistic Regression
Oct 07, 2022
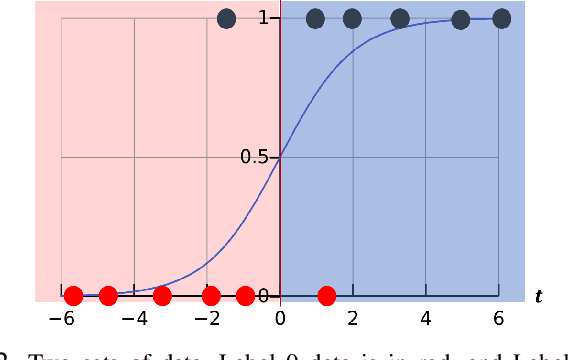
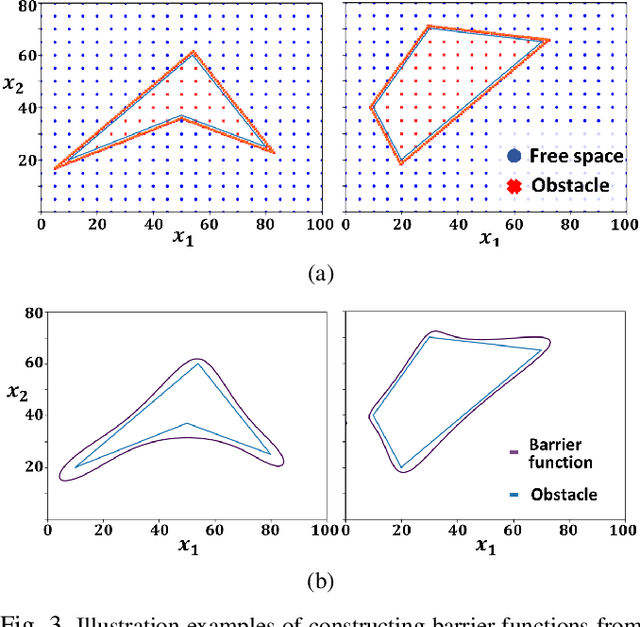
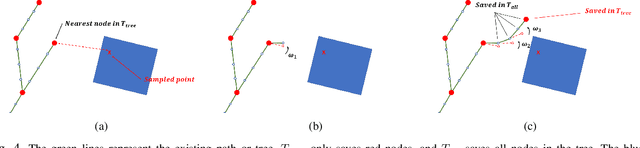
Safe path planning is critical for bipedal robots to operate in safety-critical environments. Common path planning algorithms, such as RRT or RRT*, typically use geometric or kinematic collision check algorithms to ensure collision-free paths toward the target position. However, such approaches may generate non-smooth paths that do not comply with the dynamics constraints of walking robots. It has been shown that the control barrier function (CBF) can be integrated with RRT/RRT* to synthesize dynamically feasible collision-free paths. Yet, existing work has been limited to simple circular or elliptical shape obstacles due to the challenging nature of constructing appropriate barrier functions to represent irregular-shaped obstacles. In this paper, we present a CBF-based RRT* algorithm for bipedal robots to generate a collision-free path through complex space with polynomial-shaped obstacles. In particular, we used logistic regression to construct polynomial barrier functions from a grid map of the environment to represent arbitrarily shaped obstacles. Moreover, we developed a multi-step CBF steering controller to ensure the efficiency of free space exploration. The proposed approach was first validated in simulation for a differential drive model, and then experimentally evaluated with a 3D humanoid robot, Digit, in a lab setting with randomly placed obstacles.