 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Building Secure UAV Navigation with FHE-aware Knowledge Distillation
Nov 01, 2024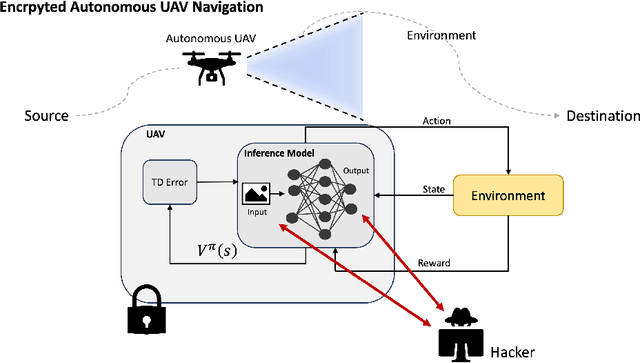
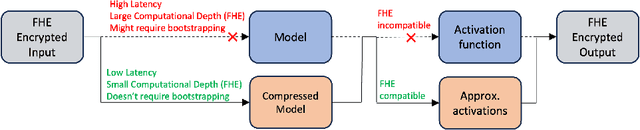

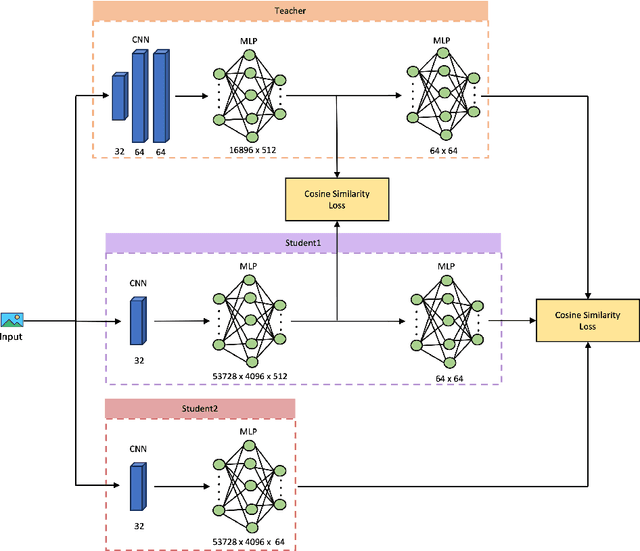
In safeguarding mission-critical systems, such as Unmanned Aerial Vehicles (UAVs), preserving the privacy of path trajectories during navigation is paramount. While the combination of Reinforcement Learning (RL) and Fully Homomorphic Encryption (FHE) holds promise, the computational overhead of FHE presents a significant challenge. This paper proposes an innovative approach that leverages Knowledge Distillation to enhance the practicality of secure UAV navigation. By integrating RL and FHE, our framework addresses vulnerabilities to adversarial attacks while enabling real-time processing of encrypted UAV camera feeds, ensuring data security. To mitigate FHE's latency, Knowledge Distillation is employed to compress the network, resulting in an impressive 18x speedup without compromising performance, as evidenced by an R-squared score of 0.9499 compared to the original model's score of 0.9631. Our methodology underscores the feasibility of processing encrypted data for UAV navigation tasks, emphasizing security alongside performance efficiency and timely processing. These findings pave the way for deploying autonomous UAVs in sensitive environments, bolstering their resilience against potential security threats.
Confidential and Protected Disease Classifier using Fully Homomorphic Encryption
May 05, 2024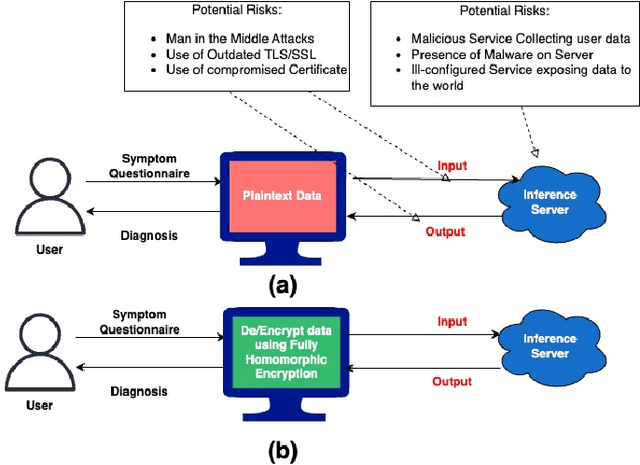
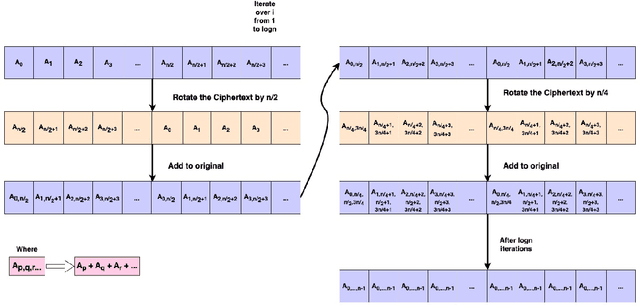
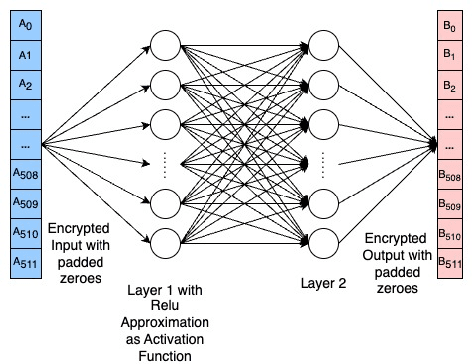
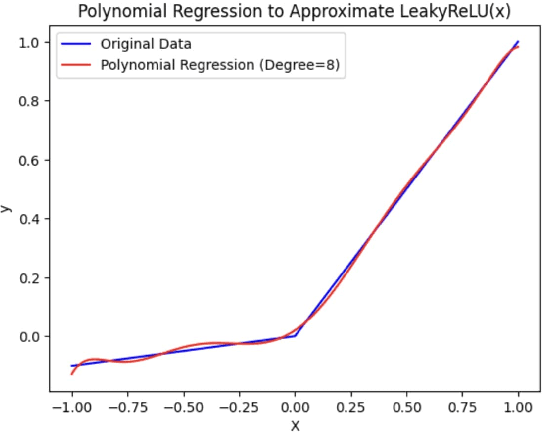
With the rapid surge in the prevalence of Large Language Models (LLMs), individuals are increasingly turning to conversational AI for initial insights across various domains, including health-related inquiries such as disease diagnosis. Many users seek potential causes on platforms like ChatGPT or Bard before consulting a medical professional for their ailment. These platforms offer valuable benefits by streamlining the diagnosis process, alleviating the significant workload of healthcare practitioners, and saving users both time and money by avoiding unnecessary doctor visits. However, Despite the convenience of such platforms, sharing personal medical data online poses risks, including the presence of malicious platforms or potential eavesdropping by attackers. To address privacy concerns, we propose a novel framework combining FHE and Deep Learning for a secure and private diagnosis system. Operating on a question-and-answer-based model akin to an interaction with a medical practitioner, this end-to-end secure system employs Fully Homomorphic Encryption (FHE) to handle encrypted input data. Given FHE's computational constraints, we adapt deep neural networks and activation functions to the encryted domain. Further, we also propose a faster algorithm to compute summation of ciphertext elements. Through rigorous experiments, we demonstrate the efficacy of our approach. The proposed framework achieves strict security and privacy with minimal loss in performance.
Enhancing Privacy and Security of Autonomous UAV Navigation
Apr 26, 2024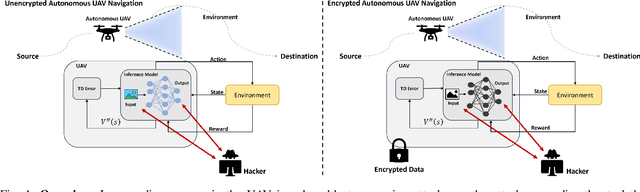
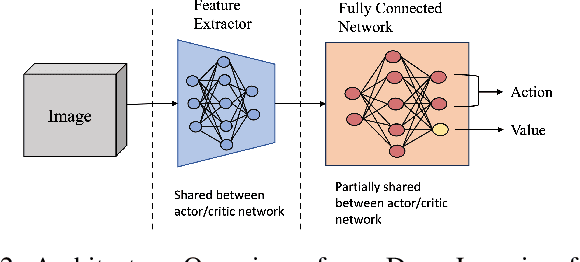
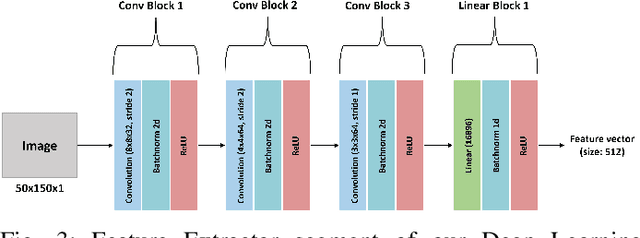
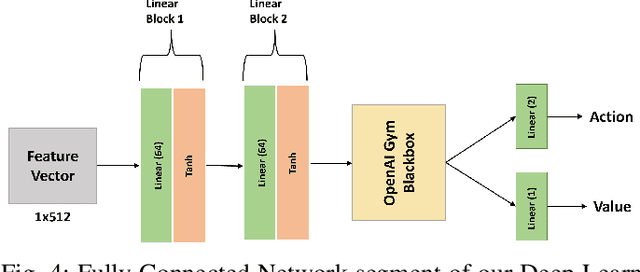
Autonomous Unmanned Aerial Vehicles (UAVs) have become essential tools in defense, law enforcement, disaster response, and product delivery. These autonomous navigation systems require a wireless communication network, and of late are deep learning based. In critical scenarios such as border protection or disaster response, ensuring the secure navigation of autonomous UAVs is paramount. But, these autonomous UAVs are susceptible to adversarial attacks through the communication network or the deep learning models - eavesdropping / man-in-the-middle / membership inference / reconstruction. To address this susceptibility, we propose an innovative approach that combines Reinforcement Learning (RL) and Fully Homomorphic Encryption (FHE) for secure autonomous UAV navigation. This end-to-end secure framework is designed for real-time video feeds captured by UAV cameras and utilizes FHE to perform inference on encrypted input images. While FHE allows computations on encrypted data, certain computational operators are yet to be implemented. Convolutional neural networks, fully connected neural networks, activation functions and OpenAI Gym Library are meticulously adapted to the FHE domain to enable encrypted data processing. We demonstrate the efficacy of our proposed approach through extensive experimentation. Our proposed approach ensures security and privacy in autonomous UAV navigation with negligible loss in performance.