 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edged-DQIVAR: Data-centric Visual Analytics and Reasoning for Data Quality Improvement
Jul 16, 2025Approaches to enhancing data quality (DQ) are classified into two main categories: data- and process-driven. However, prior research has predominantly utilized batch data preprocessing within the data-driven framework, which often proves insufficient for optimizing machine learning (ML) model performance and frequently leads to distortions in data characteristics. Existing studies have primarily focused on data preprocessing rather than genuine data quality improvement (DQI). In this paper, we introduce d-DQIVAR, a novel visual analytics system designed to facilitate DQI strategies aimed at improving ML model performance. Our system integrates visual analytics techniques that leverage both data-driven and process-driven approaches. Data-driven techniques tackle DQ issues such as imputation, outlier detection, deletion, format standardization, removal of duplicate records, and feature selection. Process-driven strategies encompass evaluating DQ and DQI procedures by considering DQ dimensions and ML model performance and applying the Kolmogorov-Smirnov test. We illustrate how our system empowers users to harness expert and domain knowledge effectively within a practical workflow through case studies, evaluations, and user studies.
Bespoke Nanoparticle Synthesis and Chemical Knowledge Discovery Via Autonomous Experimentations
Sep 01, 2023The optimization of nanomaterial synthesis using numerous synthetic variables is considered to be extremely laborious task because the conventional combinatorial explorations are prohibitively expensive. In this work, we report an autonomous experimentation platform developed for the bespoke design of nanoparticles (NPs) with targeted optical properties. This platform operates in a closed-loop manner between a batch synthesis module of NPs and a UV- Vis spectroscopy module, based on the feedback of the AI optimization modeling. With silver (Ag) NPs as a representative example, we demonstrate that the Bayesian optimizer implemented with the early stopping criterion can efficiently produce Ag NPs precisely possessing the desired absorption spectra within only 200 iterations (when optimizing among five synthetic reagents). In addition to the outstanding material developmental efficiency, the analysis of synthetic variables further reveals a novel chemistry involving the effects of citrate in Ag NP synthesis. The amount of citrate is a key to controlling the competitions between spherical and plate-shaped NPs and, as a result, affects the shapes of the absorption spectra as well. Our study highlights both capabilities of the platform to enhance search efficiencies and to provide a novel chemical knowledge by analyzing datasets accumulated from the autonomous experimentations.
PCSCNet: Fast 3D Semantic Segmentation of LiDAR Point Cloud for Autonomous Car using Point Convolution and Sparse Convolution Network
Feb 21, 2022
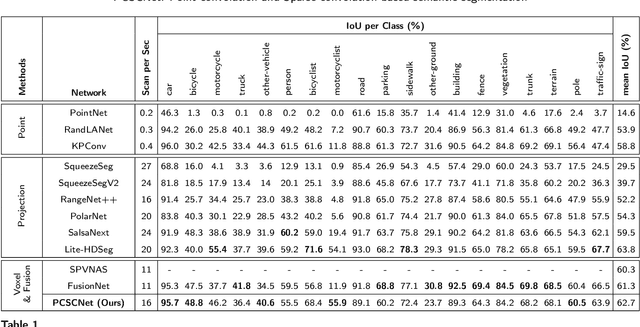
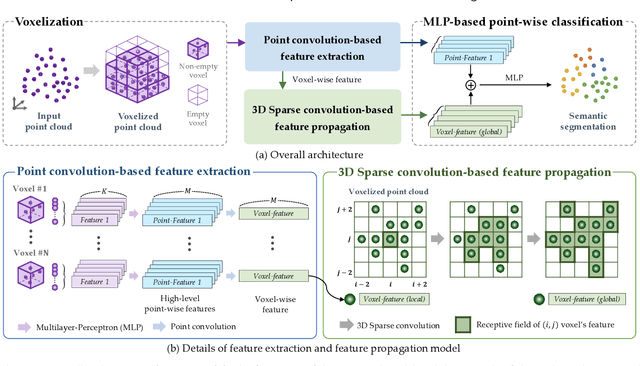

The autonomous car must recognize the driving environment quickly for safe driving. As the Light Detection And Range (LiDAR) sensor is widely used in the autonomous car, fast semantic segmentation of LiDAR point cloud, which is the point-wise classification of the point cloud within the sensor framerate, has attracted attention in recognition of the driving environment. Although the voxel and fusion-based semantic segmentation models are the state-of-the-art model in point cloud semantic segmentation recently, their real-time performance suffer from high computational load due to high voxel resolution. In this paper, we propose the fast voxel-based semantic segmentation model using Point Convolution and 3D Sparse Convolution (PCSCNet). The proposed model is designed to outperform at both high and low voxel resolution using point convolution-based feature extraction. Moreover, the proposed model accelerates the feature propagation using 3D sparse convolution after the feature extraction. The experimental results demonstrate that the proposed model outperforms the state-of-the-art real-time models in semantic segmentation of SemanticKITTI and nuScenes, and achieves the real-time performance in LiDAR point cloud inference.