 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Factory: Tracklet Cleaving and Re-connection by Deep Siamese Bi-GRU for Multiple Object Tracking
Apr 12, 2018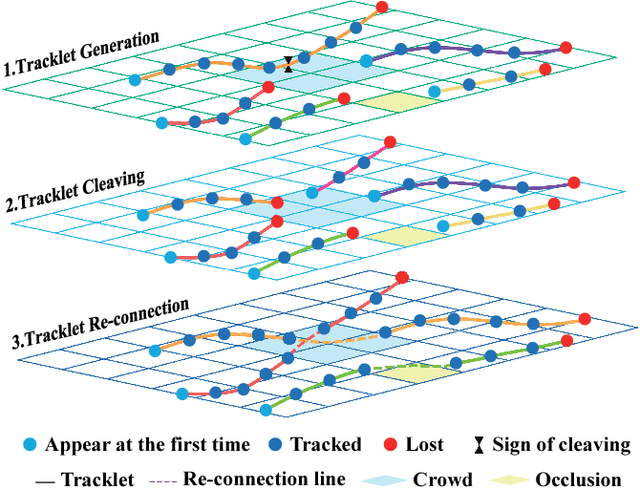
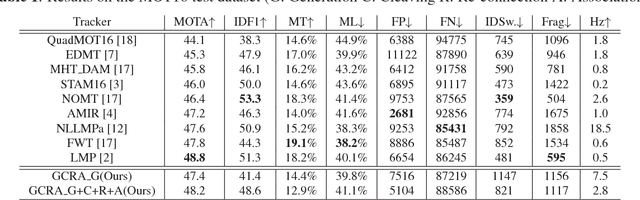
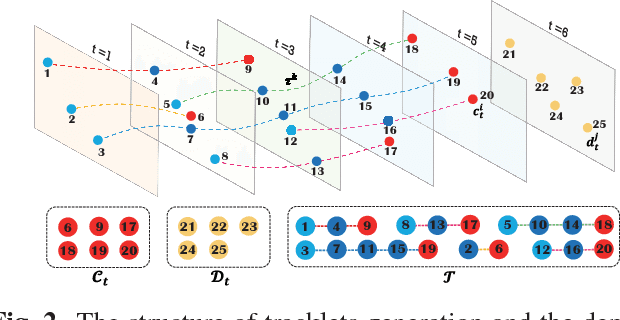
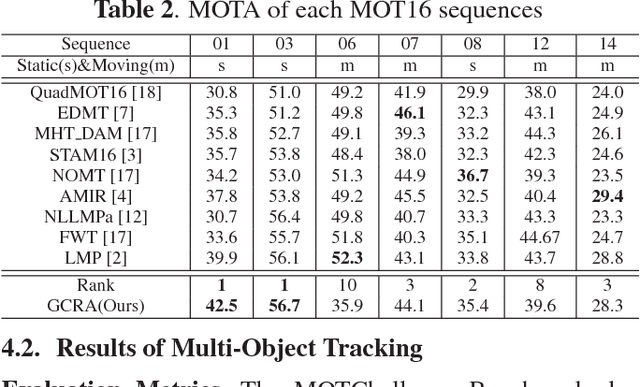
Multi-Object Tracking (MOT) is a challenging task in the complex scene such as surveillance and autonomous driving. In this paper, we propose a novel tracklet processing method to cleave and re-connect tracklets on crowd or long-term occlusion by Siamese Bi-Gated Recurrent Unit (GRU). The tracklet generation utilizes object features extracted by CNN and RNN to create the high-confidence tracklet candidates in sparse scenario. Due to mis-tracking in the generation process, the tracklets from different objects are split into several sub-tracklets by a bidirectional GRU. After that, a Siamese GRU based tracklet re-connection method is applied to link the sub-tracklets which belong to the same object to form a whole trajectory. In addition, we extract the tracklet images from existing MOT datasets and propose a novel dataset to train our networks. The proposed dataset contains more than 95160 pedestrian images. It has 793 different persons in it. On average, there are 120 images for each person with positions and sizes. Experimental results demonstrate the advantages of our model over the state-of-the-art methods on MOT16.
Noise Level Estimation for Overcomplete Dictionary Learning Based on Tight Asymptotic Bounds
Dec 09, 2017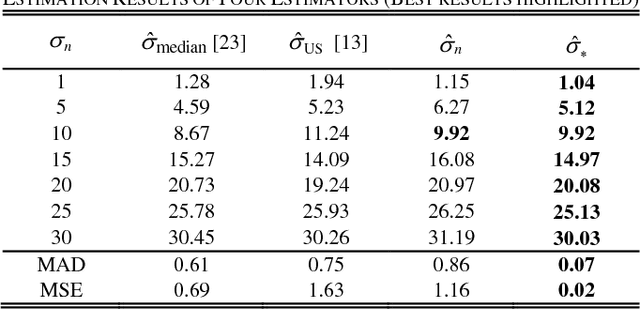
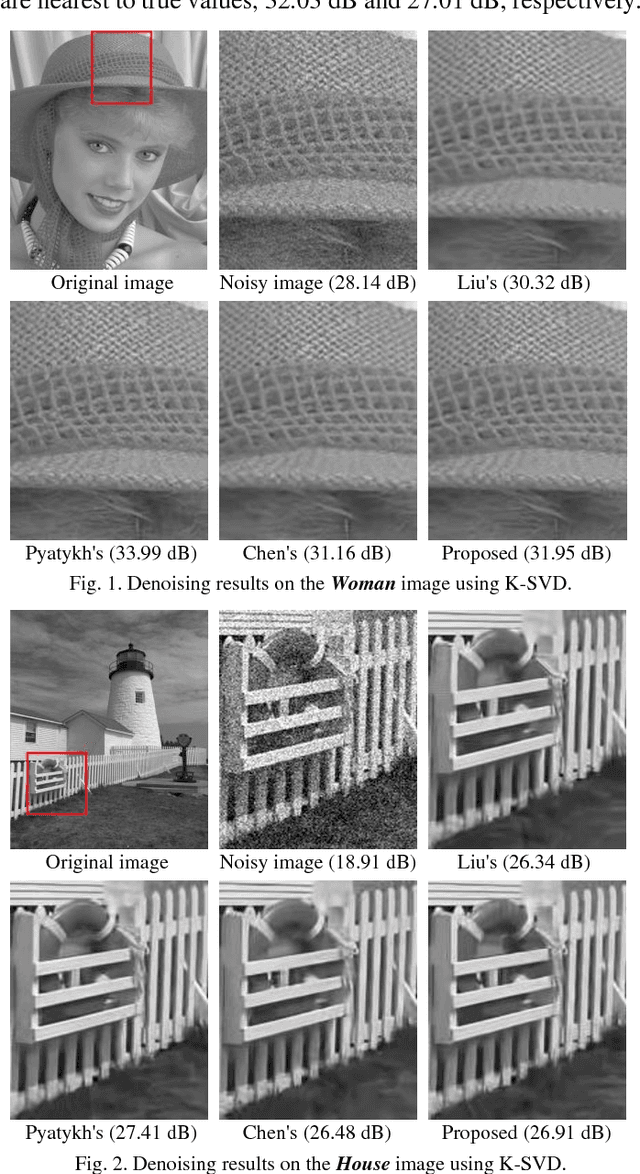
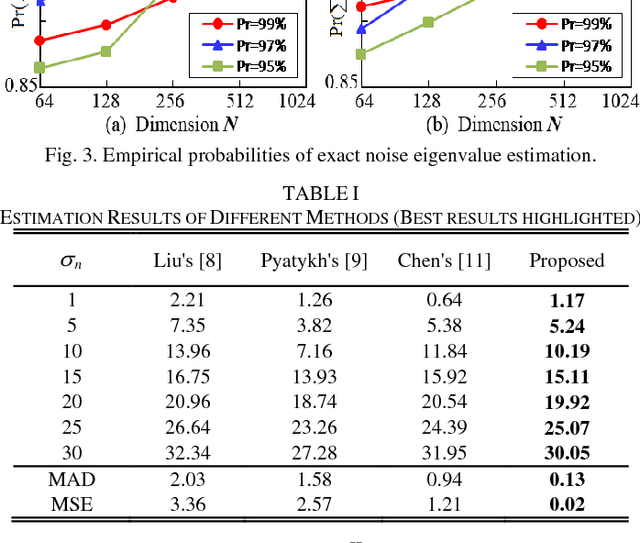
In this letter, we address the problem of estimating Gaussian noise level from the trained dictionaries in update stage. We first provide rigorous statistical analysis on the eigenvalue distributions of a sample covariance matrix. Then we propose an interval-bounded estimator for noise variance in high dimensional setting. To this end, an effective estimation method for noise level is devised based on the boundness and asymptotic behavior of noise eigenvalue spectrum. The estimation performance of our method has been guaranteed both theoretically and empirically. The analysis and experiment results have demonstrated that the proposed algorithm can reliably infer true noise levels, and outperforms the relevant existing methods.