 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePTRL: Prior Transfer Deep Reinforcement Learning for Legged Robots Locomotion
Apr 08, 2025In the field of legged robot motion control, reinforcement learning (RL) holds great promise but faces two major challenges: high computational cost for training individual robots and poor generalization of trained models. To address these problems, this paper proposes a novel framework called Prior Transfer Reinforcement Learning (PTRL), which improves both training efficiency and model transferability across different robots. Drawing inspiration from model transfer techniques in deep learning, PTRL introduces a fine-tuning mechanism that selectively freezes layers of the policy network during transfer, making it the first to apply such a method in RL. The framework consists of three stages: pre-training on a source robot using the Proximal Policy Optimization (PPO) algorithm, transferring the learned policy to a target robot, and fine-tuning with partial network freezing. Extensive experiments on various robot platforms confirm that this approach significantly reduces training time while maintaining or even improving performance. Moreover, the study quantitatively analyzes how the ratio of frozen layers affects transfer results, providing valuable insights into optimizing the process. The experimental outcomes show that PTRL achieves better walking control performance and demonstrates strong generalization and adaptability, offering a promising solution for efficient and scalable RL-based control of legged robots.
Spiral Complete Coverage Path Planning Based on Conformal Slit Mapping in Multi-connected Domains
Sep 19, 2023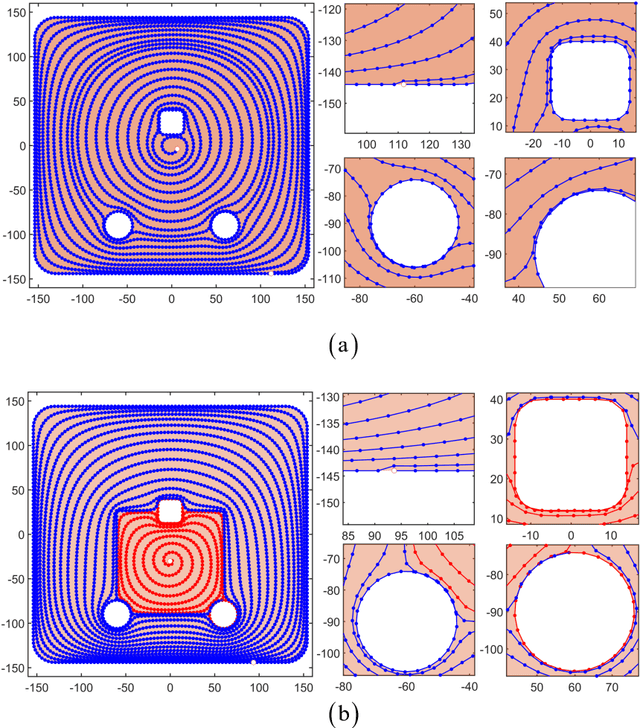

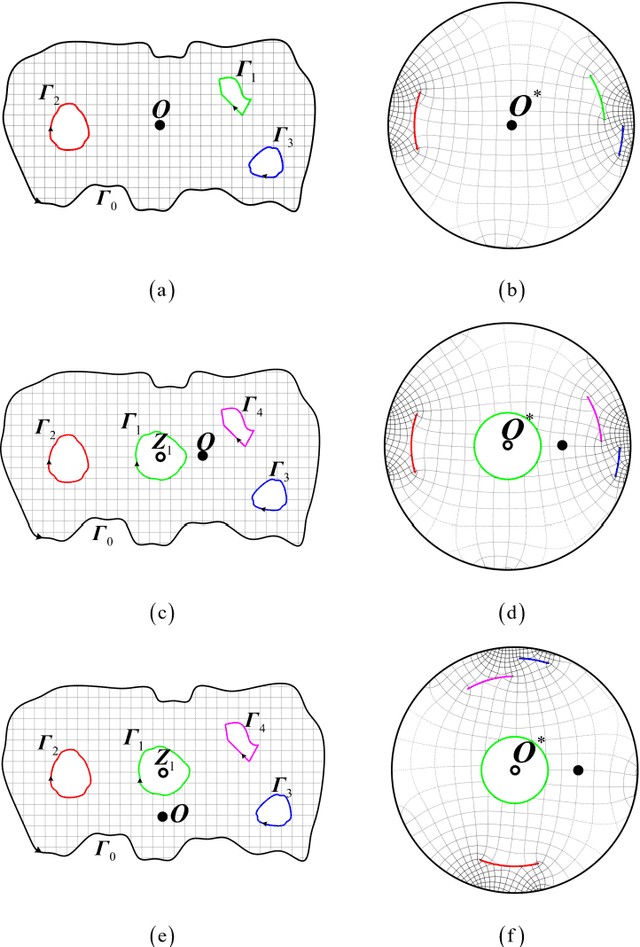
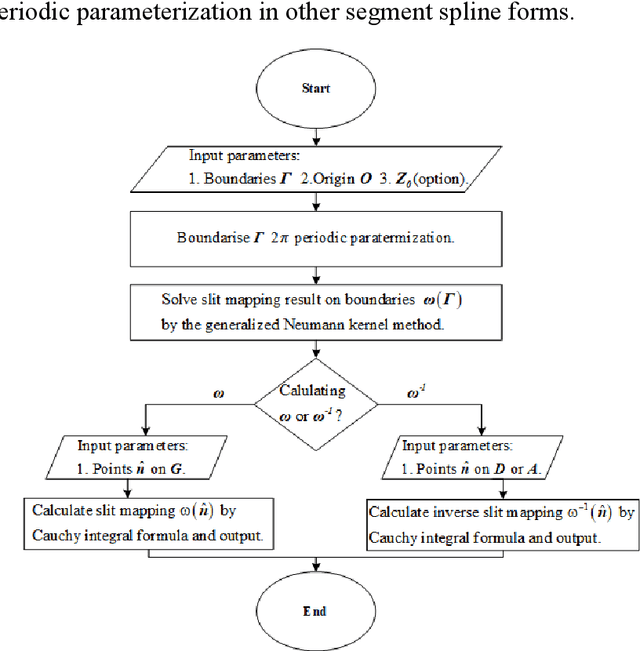
Generating a smooth and shorter spiral complete coverage path in a multi-connected domain is an important research area in robotic cavity machining. Traditional spiral path planning methods in multi-connected domains involve a subregion division procedure; a deformed spiral path is incorporated within each subregion, and these paths within the subregions are interconnected with bridges. In intricate domains with abundant voids and irregular boundaries, the added subregion boundaries increase the path avoidance requirements. This results in excessive bridging and necessitates longer uneven-density spirals to achieve complete subregion coverage. Considering that conformal slit mapping can transform multi-connected regions into regular disks or annuluses without subregion division, this paper presents a novel spiral complete coverage path planning method by conformal slit mapping. Firstly, a slit mapping calculation technique is proposed for segmented cubic spline boundaries with corners. Then, a spiral path spacing control method is developed based on the maximum inscribed circle radius between adjacent conformal slit mapping iso-parameters. Lastly, the spiral path is derived by offsetting iso-parameters. The complexity and applicability of the proposed method are comprehensively analyzed across various boundary scenarios. Meanwhile, two cavities milling experiments are conducted to compare the new method with conventional spiral complete coverage path methods. The comparation indicate that the new path meets the requirement for complete coverage in cavity machining while reducing path length and machining time by 12.70% and 12.34%, respectively.