 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpiral Complete Coverage Path Planning Based on Conformal Slit Mapping in Multi-connected Domains
Paper and Code
Sep 19, 2023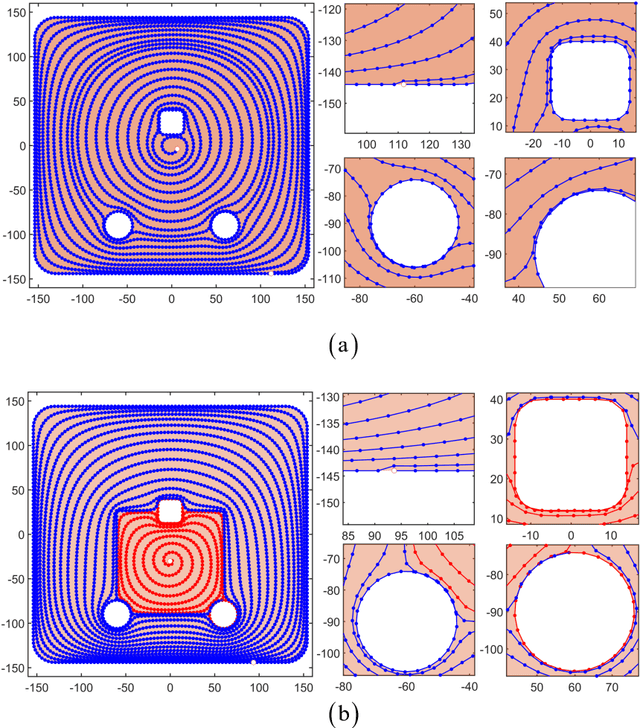

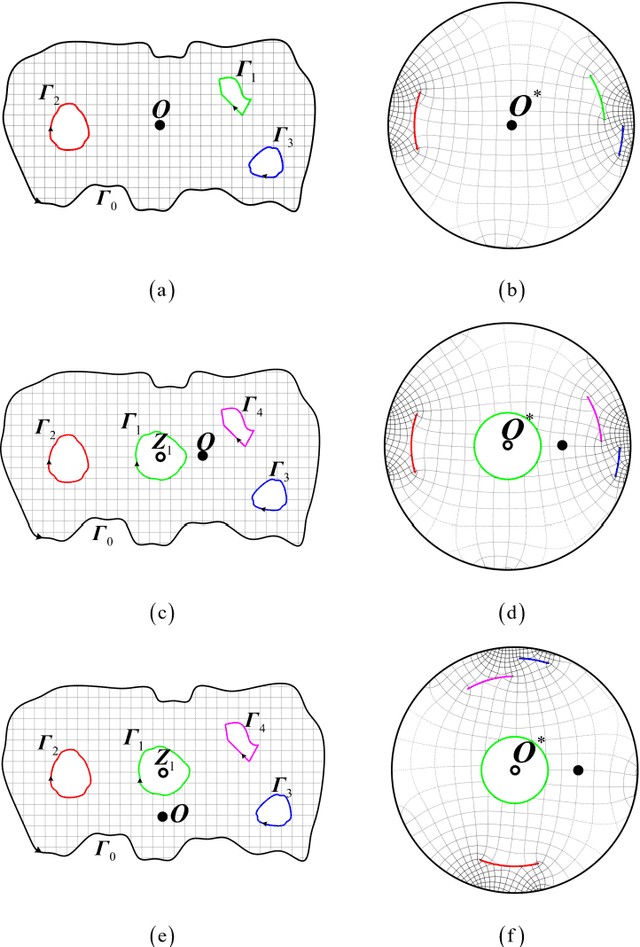
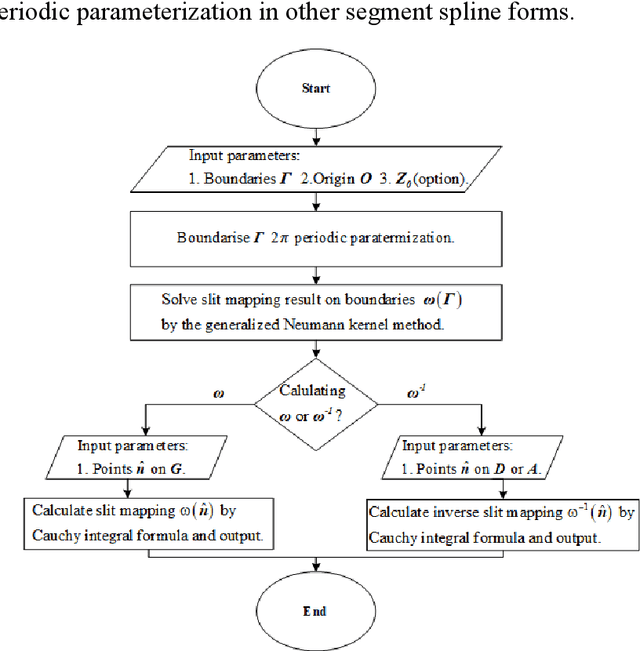
Generating a smooth and shorter spiral complete coverage path in a multi-connected domain is an important research area in robotic cavity machining. Traditional spiral path planning methods in multi-connected domains involve a subregion division procedure; a deformed spiral path is incorporated within each subregion, and these paths within the subregions are interconnected with bridges. In intricate domains with abundant voids and irregular boundaries, the added subregion boundaries increase the path avoidance requirements. This results in excessive bridging and necessitates longer uneven-density spirals to achieve complete subregion coverage. Considering that conformal slit mapping can transform multi-connected regions into regular disks or annuluses without subregion division, this paper presents a novel spiral complete coverage path planning method by conformal slit mapping. Firstly, a slit mapping calculation technique is proposed for segmented cubic spline boundaries with corners. Then, a spiral path spacing control method is developed based on the maximum inscribed circle radius between adjacent conformal slit mapping iso-parameters. Lastly, the spiral path is derived by offsetting iso-parameters. The complexity and applicability of the proposed method are comprehensively analyzed across various boundary scenarios. Meanwhile, two cavities milling experiments are conducted to compare the new method with conventional spiral complete coverage path methods. The comparation indicate that the new path meets the requirement for complete coverage in cavity machining while reducing path length and machining time by 12.70% and 12.34%, respectively.