 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Autoregressive Inference for Transformer Probabilistic Models
Oct 10, 2025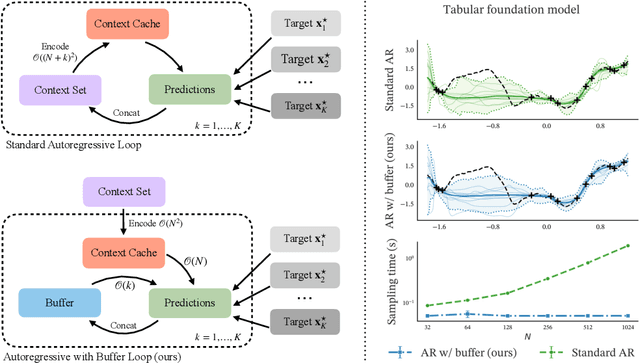

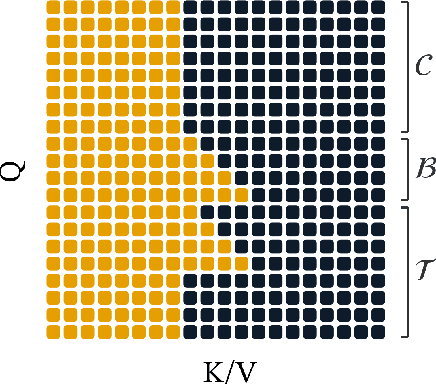

Transformer-based models for amortized probabilistic inference, such as neural processes, prior-fitted networks, and tabular foundation models, excel at single-pass marginal prediction. However, many real-world applications, from signal interpolation to multi-column tabular predictions, require coherent joint distributions that capture dependencies between predictions. While purely autoregressive architectures efficiently generate such distributions, they sacrifice the flexible set-conditioning that makes these models powerful for meta-learning. Conversely, the standard approach to obtain joint distributions from set-based models requires expensive re-encoding of the entire augmented conditioning set at each autoregressive step. We introduce a causal autoregressive buffer that preserves the advantages of both paradigms. Our approach decouples context encoding from updating the conditioning set. The model processes the context once and caches it. A dynamic buffer then captures target dependencies: as targets are incorporated, they enter the buffer and attend to both the cached context and previously buffered targets. This enables efficient batched autoregressive generation and one-pass joint log-likelihood evaluation. A unified training strategy allows seamless integration of set-based and autoregressive modes at minimal additional cost. Across synthetic functions, EEG signals, cognitive models, and tabular data, our method matches predictive accuracy of strong baselines while delivering up to 20 times faster joint sampling. Our approach combines the efficiency of autoregressive generative models with the representational power of set-based conditioning, making joint prediction practical for transformer-based probabilistic models.
Amortized Safe Active Learning for Real-Time Decision-Making: Pretrained Neural Policies from Simulated Nonparametric Functions
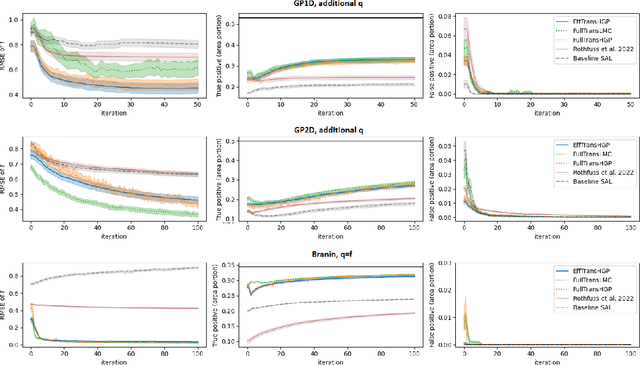
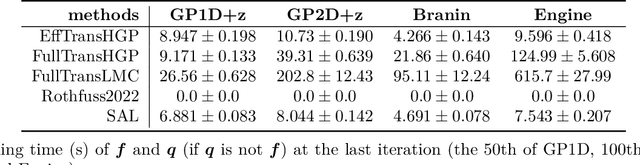
Jan 26, 2025Active Learning (AL) is a sequential learning approach aiming at selecting the most informative data for model training. In many systems, safety constraints appear during data evaluation, requiring the development of safe AL methods. Key challenges of AL are the repeated model training and acquisition optimization required for data selection, which become particularly restrictive under safety constraints. This repeated effort often creates a bottleneck, especially in physical systems requiring real-time decision-making. In this paper, we propose a novel amortized safe AL framework. By leveraging a pretrained neural network policy, our method eliminates the need for repeated model training and acquisition optimization, achieving substantial speed improvements while maintaining competitive learning outcomes and safety awareness. The policy is trained entirely on synthetic data utilizing a novel safe AL objective. The resulting policy is highly versatile and adapts to a wide range of systems, as we demonstrate in our experiments. Furthermore, our framework is modular and we empirically show that we also achieve superior performance for unconstrained time-sensitive AL tasks if we omit the safety requirement.
Amortized Active Learning for Nonparametric Functions
Jul 25, 2024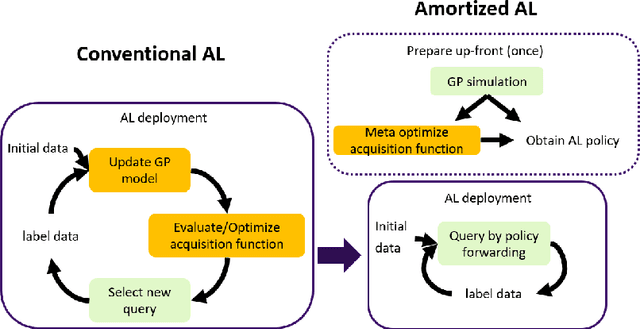
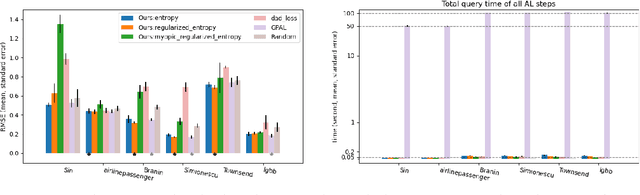
Active learning (AL) is a sequential learning scheme aiming to select the most informative data. AL reduces data consumption and avoids the cost of labeling large amounts of data. However, AL trains the model and solves an acquisition optimization for each selection. It becomes expensive when the model training or acquisition optimization is challenging. In this paper, we focus on active nonparametric function learning, where the gold standard Gaussian process (GP) approaches suffer from cubic time complexity. We propose an amortized AL method, where new data are suggested by a neural network which is trained up-front without any real data (Figure 1). Our method avoids repeated model training and requires no acquisition optimization during the AL deployment. We (i) utilize GPs as function priors to construct an AL simulator, (ii) train an AL policy that can zero-shot generalize from simulation to real learning problems of nonparametric functions and (iii) achieve real-time data selection and comparable learning performances to time-consuming baseline methods.
Global Safe Sequential Learning via Efficient Knowledge Transfer
Feb 22, 2024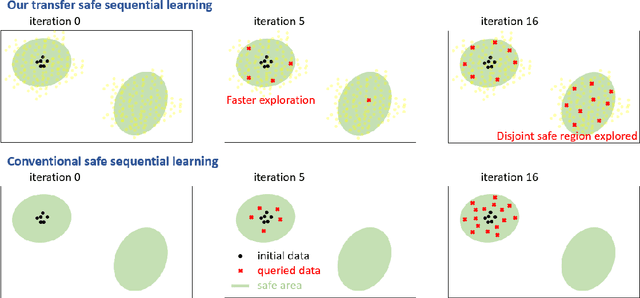
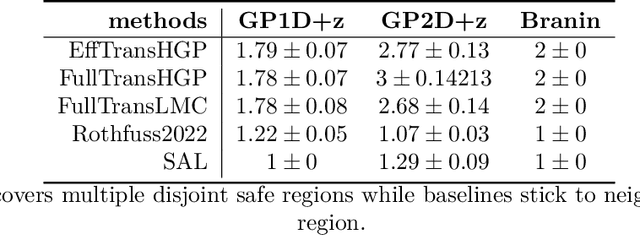
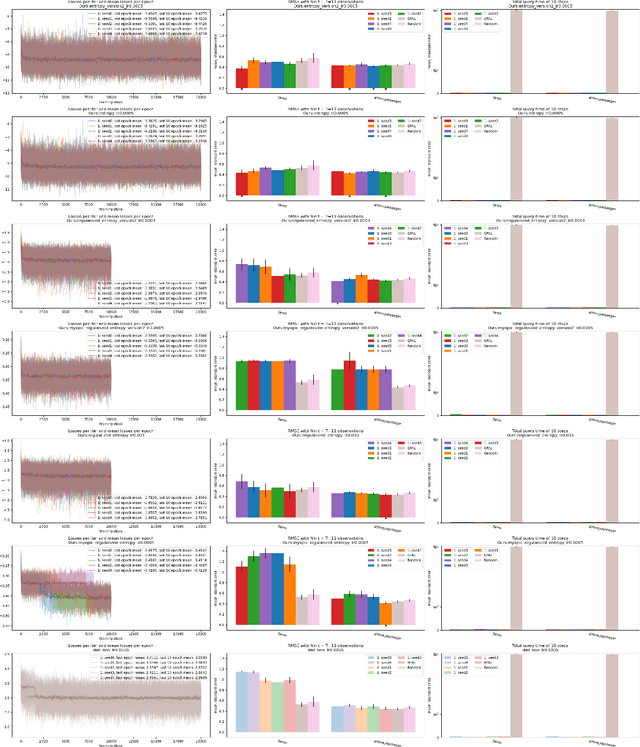
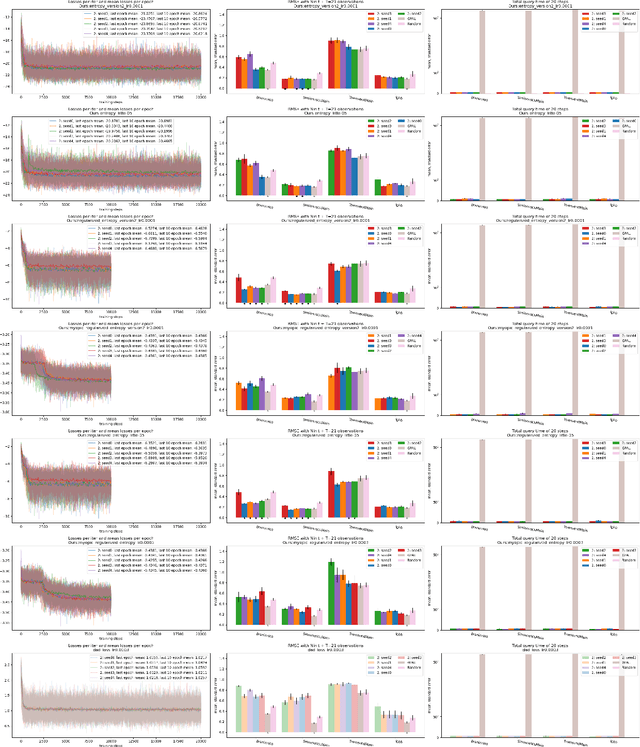
Sequential learning methods such as active learning and Bayesian optimization select the most informative data to learn about a task. In many medical or engineering applications, the data selection is constrained by a priori unknown safety conditions. A promissing line of safe learning methods utilize Gaussian processes (GPs) to model the safety probability and perform data selection in areas with high safety confidence. However, accurate safety modeling requires prior knowledge or consumes data. In addition, the safety confidence centers around the given observations which leads to local exploration. As transferable source knowledge is often available in safety critical experiments, we propose to consider transfer safe sequential learning to accelerate the learning of safety. We further consider a pre-computation of source components to reduce the additional computational load that is introduced by incorporating source data. In this paper, we theoretically analyze the maximum explorable safe regions of conventional safe learning methods. Furthermore, we empirically demonstrate that our approach 1) learns a task with lower data consumption, 2) globally explores multiple disjoint safe regions under guidance of the source knowledge, and 3) operates with computation comparable to conventional safe learning methods.
Safe Active Learning for Multi-Output Gaussian Processes
Mar 28, 2022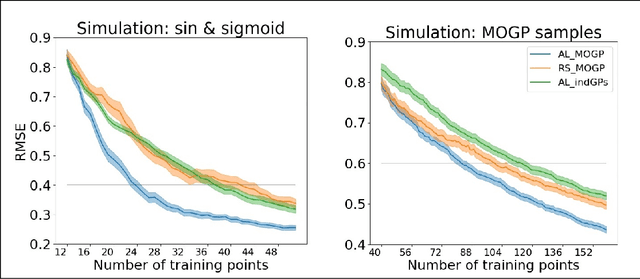
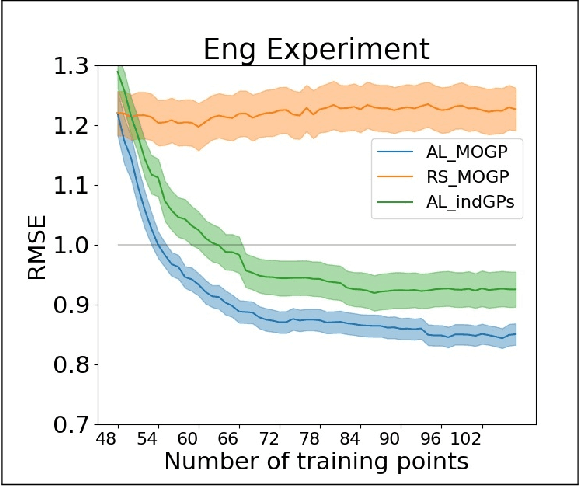
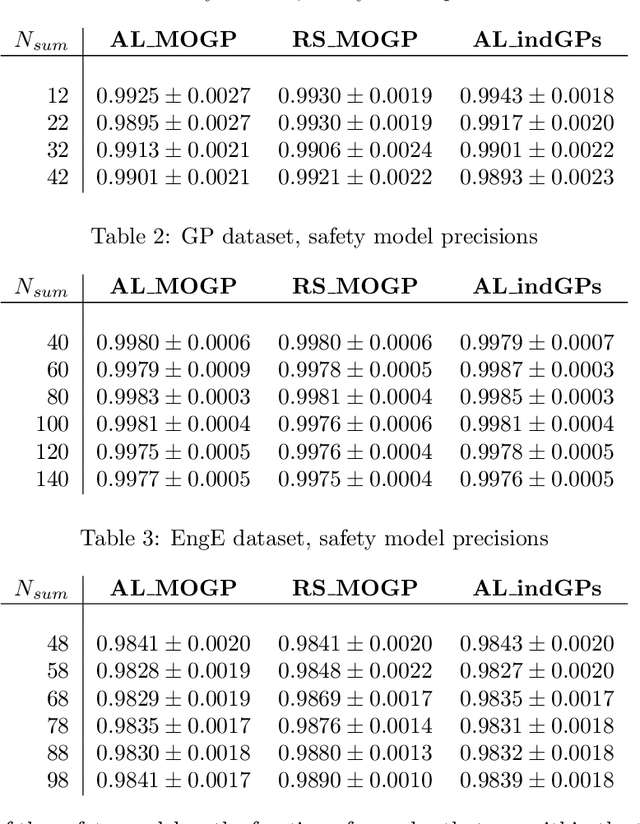
Multi-output regression problems are commonly encountered in science and engineering. In particular, multi-output Gaussian processes have been emerged as a promising tool for modeling these complex systems since they can exploit the inherent correlations and provide reliable uncertainty estimates. In many applications, however, acquiring the data is expensive and safety concerns might arise (e.g. robotics, engineering). We propose a safe active learning approach for multi-output Gaussian process regression. This approach queries the most informative data or output taking the relatedness between the regressors and safety constraints into account. We prove the effectiveness of our approach by providing theoretical analysis and by demonstrating empirical results on simulated datasets and on a real-world engineering dataset. On all datasets, our approach shows improved convergence compared to its competitors.