 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdapting to Unseen Environments through Explicit Representation of Context
Feb 13, 2020



In order to deploy autonomous agents to domains such as autonomous driving, infrastructure management, health care, and finance, they must be able to adapt safely to unseen situations. The current approach in constructing such agents is to try to include as much variation into training as possible, and then generalize within the possible variations. This paper proposes a principled approach where a context module is coevolved with a skill module. The context module recognizes the variation and modulates the skill module so that the entire system performs well in unseen situations. The approach is evaluated in a challenging version of the Flappy Bird game where the effects of the actions vary over time. The Context+Skill approach leads to significantly more robust behavior in environments with previously unseen effects. Such a principled generalization ability is essential in deploying autonomous agents in real world tasks, and can serve as a foundation for continual learning as well.
Functional Generative Design of Mechanisms with Recurrent Neural Networks and Novelty Search
Mar 25, 2019
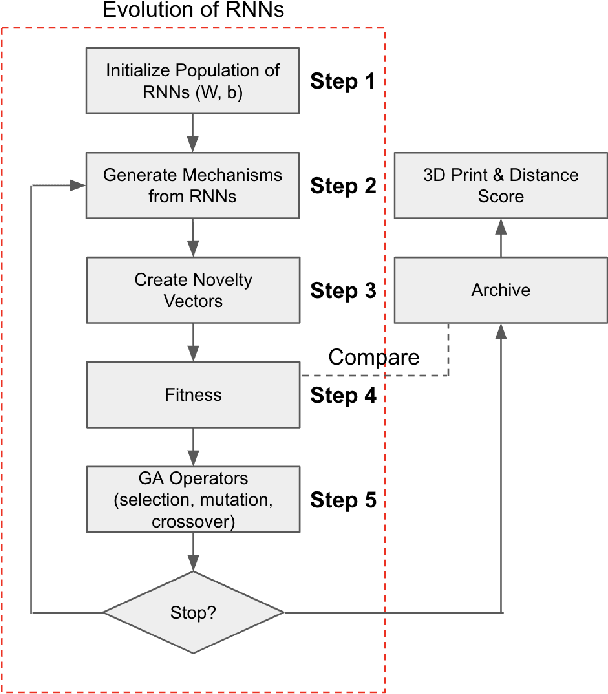
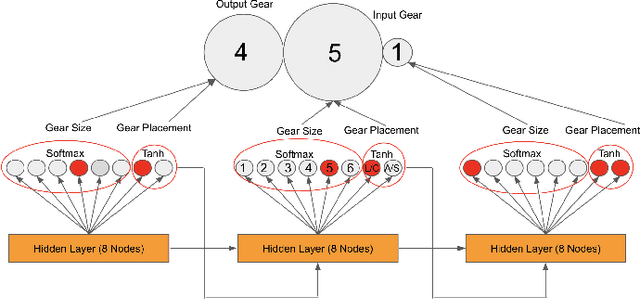
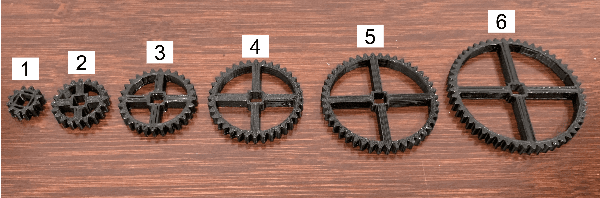
Consumer-grade 3D printers have made it easier to fabricate aesthetic objects and static assemblies, opening the door to automated design of such objects. However, while static designs are easily produced with 3D printing, functional designs with moving parts are more difficult to generate: The search space is too high-dimensional, the resolution of the 3D-printed parts is not adequate, and it is difficult to predict the physical behavior of imperfect 3D-printed mechanisms. An example challenge is to produce a diverse set of reliable and effective gear mechanisms that could be used after production without extensive post-processing. To meet this challenge, an indirect encoding based on a Recurrent Neural Network (RNN) is created and evolved using novelty search. The elite solutions of each generation are 3D printed to evaluate their functional performance on a physical test platform. The system is able to discover sequential design rules that are difficult to discover with other methods. Compared to direct encoding evolved with Genetic Algorithms (GAs), its designs are geometrically more diverse and functionally more effective. It therefore forms a promising foundation for the generative design of 3D-printed, functional mechanisms.
Functional Generative Design: An Evolutionary Approach to 3D-Printing
Apr 19, 2018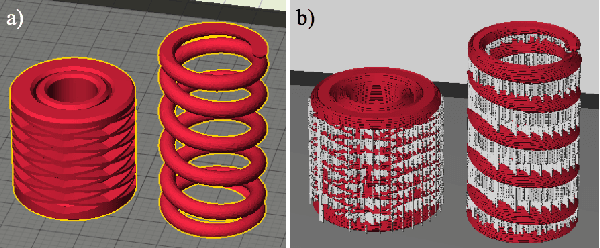


Consumer-grade printers are widely available, but their ability to print complex objects is limited. Therefore, new designs need to be discovered that serve the same function, but are printable. A representative such problem is to produce a working, reliable mechanical spring. The proposed methodology for discovering solutions to this problem consists of three components: First, an effective search space is learned through a variational autoencoder (VAE); second, a surrogate model for functional designs is built; and third, a genetic algorithm is used to simultaneously update the hyperparameters of the surrogate and to optimize the designs using the updated surrogate. Using a car-launcher mechanism as a test domain, spring designs were 3D-printed and evaluated to update the surrogate model. Two experiments were then performed: First, the initial set of designs for the surrogate-based optimizer was selected randomly from the training set that was used for training the VAE model, which resulted in an exploitative search behavior. On the other hand, in the second experiment, the initial set was composed of more uniformly selected designs from the same training set and a more explorative search behavior was observed. Both of the experiments showed that the methodology generates interesting, successful, and reliable spring geometries robust to the noise inherent in the 3D printing process. The methodology can be generalized to other functional design problems, thus making consumer-grade 3D printing more versatile.