 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEqui-Euler GraphNet: An Equivariant, Temporal-Dynamics Informed Graph Neural Network for Dual Force and Trajectory Prediction in Multi-Body Systems
Apr 22, 2025



Accurate real-time modeling of multi-body dynamical systems is essential for enabling digital twin applications across industries. While many data-driven approaches aim to learn system dynamics, jointly predicting internal loads and system trajectories remains a key challenge. This dual prediction is especially important for fault detection and predictive maintenance, where internal loads-such as contact forces-act as early indicators of faults, reflecting wear or misalignment before affecting motion. These forces also serve as inputs to degradation models (e.g., crack growth), enabling damage prediction and remaining useful life estimation. We propose Equi-Euler GraphNet, a physics-informed graph neural network (GNN) that simultaneously predicts internal forces and global trajectories in multi-body systems. In this mesh-free framework, nodes represent system components and edges encode interactions. Equi-Euler GraphNet introduces two inductive biases: (1) an equivariant message-passing scheme, interpreting edge messages as interaction forces consistent under Euclidean transformations; and (2) a temporal-aware iterative node update mechanism, based on Euler integration, to capture influence of distant interactions over time. Tailored for cylindrical roller bearings, it decouples ring dynamics from constrained motion of rolling elements. Trained on high-fidelity multiphysics simulations, Equi-Euler GraphNet generalizes beyond the training distribution, accurately predicting loads and trajectories under unseen speeds, loads, and configurations. It outperforms state-of-the-art GNNs focused on trajectory prediction, delivering stable rollouts over thousands of time steps with minimal error accumulation. Achieving up to a 200x speedup over conventional solvers while maintaining comparable accuracy, it serves as an efficient reduced-order model for digital twins, design, and maintenance.
Graph Neural Networks for Virtual Sensing in Complex Systems: Addressing Heterogeneous Temporal Dynamics
Jul 26, 2024



Real-time condition monitoring is crucial for the reliable and efficient operation of complex systems. However, relying solely on physical sensors can be limited due to their cost, placement constraints, or inability to directly measure certain critical parameters. Virtual sensing addresses these limitations by leveraging readily available sensor data and system knowledge to estimate inaccessible parameters or infer system states. The increasing complexity of industrial systems necessitates deployments of sensors with diverse modalities to provide a comprehensive understanding of system states. These sensors capture data at varying frequencies to monitor both rapid and slowly varying system dynamics, as well as local and global state evolutions of the systems. This leads to heterogeneous temporal dynamics, which, particularly under varying operational end environmental conditions, pose a significant challenge for accurate virtual sensing. To address this, we propose a Heterogeneous Temporal Graph Neural Network (HTGNN) framework. HTGNN explicitly models signals from diverse sensors and integrates operating conditions into the model architecture. We evaluate HTGNN using two newly released datasets: a bearing dataset with diverse load conditions for bearing load prediction and a year-long simulated dataset for predicting bridge live loads. Our results demonstrate that HTGNN significantly outperforms established baseline methods in both tasks, particularly under highly varying operating conditions. These results highlight HTGNN's potential as a robust and accurate virtual sensing approach for complex systems, paving the way for improved monitoring, predictive maintenance, and enhanced system performance.
Virtual Sensor for Real-Time Bearing Load Prediction Using Heterogeneous Temporal Graph Neural Networks
Apr 02, 2024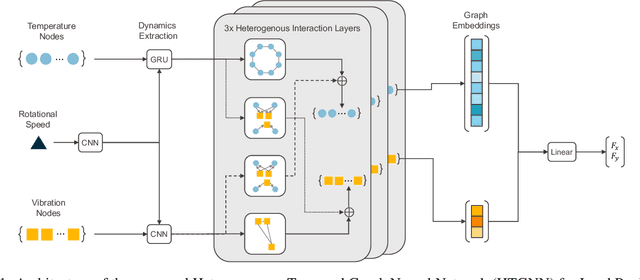


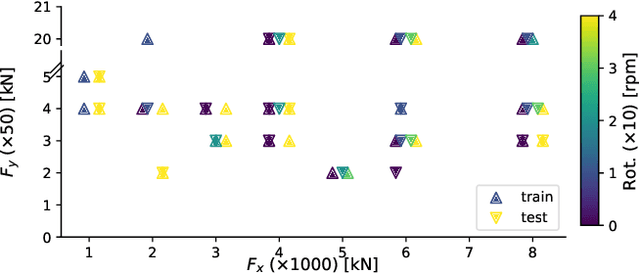
Accurate bearing load monitoring is essential for their Prognostics and Health Management (PHM), enabling damage assessment, wear prediction, and proactive maintenance. While bearing sensors are typically placed on the bearing housing, direct load monitoring requires sensors inside the bearing itself. Recently introduced sensor rollers enable direct bearing load monitoring but are constrained by their battery life. Data-driven virtual sensors can learn from sensor roller data collected during a batterys lifetime to map operating conditions to bearing loads. Although spatially distributed bearing sensors offer insights into load distribution (e.g., correlating temperature with load), traditional machine learning algorithms struggle to fully exploit these spatial-temporal dependencies. To address this gap, we introduce a graph-based virtual sensor that leverages Graph Neural Networks (GNNs) to analyze spatial-temporal dependencies among sensor signals, mapping existing measurements (temperature, vibration) to bearing loads. Since temperature and vibration signals exhibit vastly different dynamics, we propose Heterogeneous Temporal Graph Neural Networks (HTGNN), which explicitly models these signal types and their interactions for effective load prediction. Our results demonstrate that HTGNN outperforms Convolutional Neural Networks (CNNs), which struggle to capture both spatial and heterogeneous signal characteristics. These findings highlight the importance of capturing the complex spatial interactions between temperature, vibration, and load.
Graph Neural Networks for Dynamic Modeling of Roller Bearing
Sep 19, 2023In the presented work, we propose to apply the framework of graph neural networks (GNNs) to predict the dynamics of a rolling element bearing. This approach offers generalizability and interpretability, having the potential for scalable use in real-time operational digital twin systems for monitoring the health state of rotating machines. By representing the bearing's components as nodes in a graph, the GNN can effectively model the complex relationships and interactions among them. We utilize a dynamic spring-mass-damper model of a bearing to generate the training data for the GNN. In this model, discrete masses represent bearing components such as rolling elements, inner raceways, and outer raceways, while a Hertzian contact model is employed to calculate the forces between these components. We evaluate the learning and generalization capabilities of the proposed GNN framework by testing different bearing configurations that deviate from the training configurations. Through this approach, we demonstrate the effectiveness of the GNN-based method in accurately predicting the dynamics of rolling element bearings, highlighting its potential for real-time health monitoring of rotating machinery.
Domain Adaptation via Alignment of Operation Profile for Remaining Useful Lifetime Prediction
Feb 03, 2023Effective Prognostics and Health Management (PHM) relies on accurate prediction of the Remaining Useful Life (RUL). Data-driven RUL prediction techniques rely heavily on the representativeness of the available time-to-failure trajectories. Therefore, these methods may not perform well when applied to data from new units of a fleet that follow different operating conditions than those they were trained on. This is also known as domain shifts. Domain adaptation (DA) methods aim to address the domain shift problem by extracting domain invariant features. However, DA methods do not distinguish between the different phases of operation, such as steady states or transient phases. This can result in misalignment due to under- or over-representation of different operation phases. This paper proposes two novel DA approaches for RUL prediction based on an adversarial domain adaptation framework that considers the different phases of the operation profiles separately. The proposed methodologies align the marginal distributions of each phase of the operation profile in the source domain with its counterpart in the target domain. The effectiveness of the proposed methods is evaluated using the New Commercial Modular Aero-Propulsion System (N-CMAPSS) dataset, where sub-fleets of turbofan engines operating in one of the three different flight classes (short, medium, and long) are treated as separate domains. The experimental results show that the proposed methods improve the accuracy of RUL predictions compared to current state-of-the-art DA methods.
Technical Language Supervision for Intelligent Fault Diagnosis in Process Industry
Dec 11, 2021
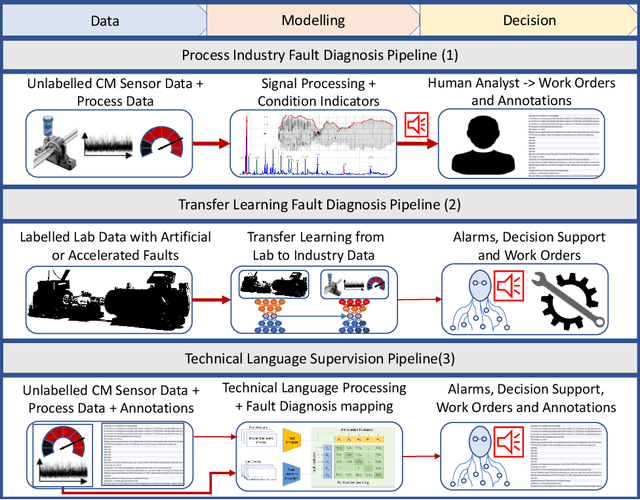
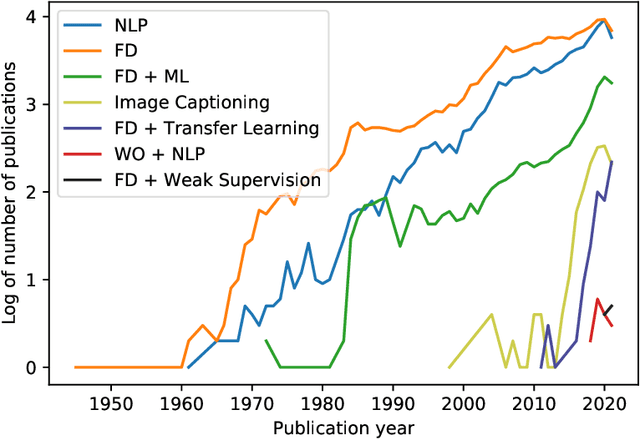

In the process industry, condition monitoring systems with automated fault diagnosis methods assisthuman experts and thereby improve maintenance efficiency, process sustainability, and workplace safety.Improving the automated fault diagnosis methods using data and machine learning-based models is a centralaspect of intelligent fault diagnosis (IFD). A major challenge in IFD is to develop realistic datasets withaccurate labels needed to train and validate models, and to transfer models trained with labeled lab datato heterogeneous process industry environments. However, fault descriptions and work-orders written bydomain experts are increasingly digitized in modern condition monitoring systems, for example in the contextof rotating equipment monitoring. Thus, domain-specific knowledge about fault characteristics and severitiesexists as technical language annotations in industrial datasets. Furthermore, recent advances in naturallanguage processing enable weakly supervised model optimization using natural language annotations, mostnotably in the form ofnatural language supervision(NLS). This creates a timely opportunity to developtechnical language supervision(TLS) solutions for IFD systems grounded in industrial data, for exampleas a complement to pre-training with lab data to address problems like overfitting and inaccurate out-of-sample generalisation. We surveyed the literature and identify a considerable improvement in the maturityof NLS over the last two years, facilitating applications beyond natural language; a rapid development ofweak supervision methods; and transfer learning as a current trend in IFD which can benefit from thesedevelopments. Finally, we describe a framework for integration of TLS in IFD which is inspired by recentNLS innovations.
Integrating Expert Knowledge with Domain Adaptation for Unsupervised Fault Diagnosis
Jul 05, 2021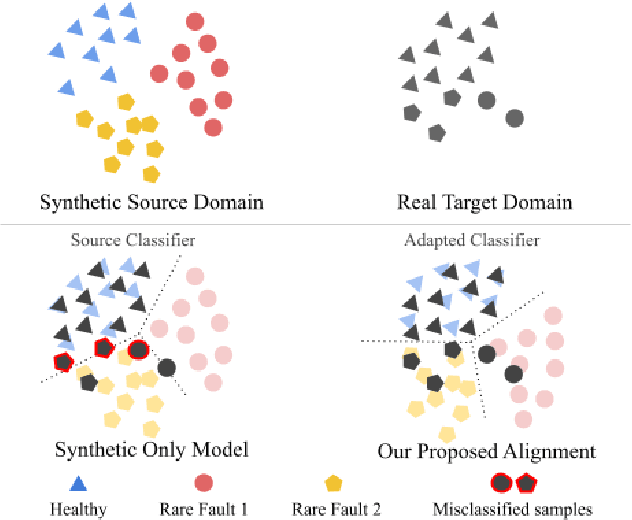



Data-driven fault diagnosis methods often require abundant labeled examples for each fault type. On the contrary, real-world data is often unlabeled and consists of mostly healthy observations and only few samples of faulty conditions. The lack of labels and fault samples imposes a significant challenge for existing data-driven fault diagnosis methods. In this paper, we aim to overcome this limitation by integrating expert knowledge with domain adaptation in a synthetic-to-real framework for unsupervised fault diagnosis. Motivated by the fact that domain experts often have a relatively good understanding on how different fault types affect healthy signals, in the first step of the proposed framework, a synthetic fault dataset is generated by augmenting real vibration samples of healthy bearings. This synthetic dataset integrates expert knowledge and encodes class information about the faults types. However, models trained solely based on the synthetic data often do not perform well because of the distinct distribution difference between the synthetically generated and real faults. To overcome this domain gap between the synthetic and real data, in the second step of the proposed framework, an imbalance-robust domain adaptation~(DA) approach is proposed to adapt the model from synthetic faults~(source) to the unlabeled real faults~(target) which suffer from severe class imbalance. The framework is evaluated on two unsupervised fault diagnosis cases for bearings, the CWRU laboratory dataset and a real-world wind-turbine dataset. Experimental results demonstrate that the generated faults are effective for encoding fault type information and the domain adaptation is robust against the different levels of class imbalance between faults.