 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopology-Aware Resilient Routing Protocol for FANETs: An Adaptive Q-Learning Approach
Jun 30, 2023
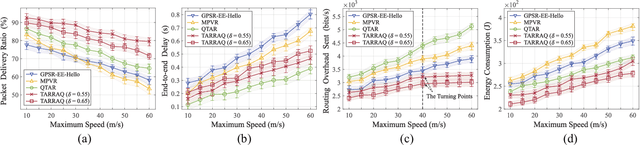


Flying ad hoc networks (FANETs) play a crucial role in numerous military and civil applications since it shortens mission duration and enhances coverage significantly compared with a single unmanned aerial vehicle (UAV). Whereas, designing an energy-efficient FANET routing protocol with a high packet delivery rate (PDR) and low delay is challenging owing to the dynamic topology changes. In this article, we propose a topology-aware resilient routing strategy based on adaptive Q-learning (TARRAQ) to accurately capture topology changes with low overhead and make routing decisions in a distributed and autonomous way. First, we analyze the dynamic behavior of UAV nodes via the queuing theory, and then the closed-form solutions of neighbors' change rate (NCR) and neighbors' change interarrival time (NCIT) distribution are derived. Based on the real-time NCR and NCIT, a resilient sensing interval (SI) is determined by defining the expected sensing delay of network events. Besides, we also present an adaptive Q-learning approach that enables UAVs to make distributed, autonomous, and adaptive routing decisions, where the above SI ensures that the action space can be updated in time at a low cost. The simulation results verify the accuracy of the topology dynamic analysis model and also prove that our TARRAQ outperforms the Q-learning-based topology-aware routing (QTAR), mobility prediction-based virtual routing (MPVR), and greedy perimeter stateless routing based on energy-efficient hello (EE-Hello) in terms of 25.23%, 20.24%, and 13.73% lower overhead, 9.41%, 14.77%, and 16.70% higher PDR, and 5.12%, 15.65%, and 11.31% lower energy consumption, respectively.
* 18 pages, 11 figure, 5 tables
Specific Beamforming for Multi-UAV Networks: A Dual Identity-based ISAC Approach
Jun 28, 2023Beam alignment is essential to compensate for the high path loss in the millimeter-wave (mmWave) Unmanned Aerial Vehicle (UAV) network. The integrated sensing and communication (ISAC) technology has been envisioned as a promising solution to enable efficient beam alignment in the dynamic UAV network. However, since the digital identity (D-ID) is not contained in the reflected echoes, the conventional ISAC solution has to either periodically feed back the D-ID to distinguish beams for multi-UAVs or suffer the beam errors induced by the separation of D-ID and physical identity (P-ID). This paper presents a novel dual identity association (DIA)-based ISAC approach, the first solution that enables specific, fast, and accurate beamforming towards multiple UAVs. In particular, the P-IDs extracted from echo signals are distinguished dynamically by calculating the feature similarity according to their prevalence, and thus the DIA is accurately achieved. We also present the extended Kalman filtering scheme to track and predict P-IDs, and the specific beam is thereby effectively aligned toward the intended UAVs in dynamic networks. Numerical results show that the proposed DIA-based ISAC solution significantly outperforms the conventional methods in association accuracy and communication performance.