 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Second Type of Uncertainty in Monte Carlo Tree Search
May 19, 2020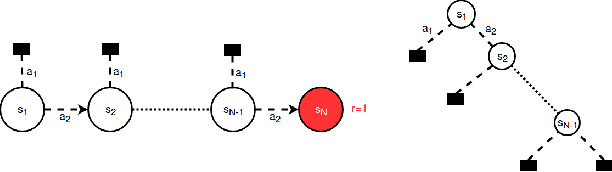
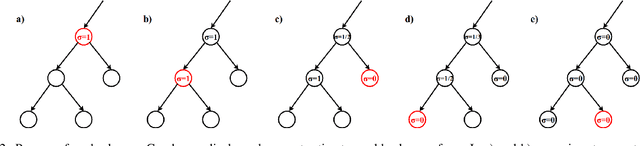
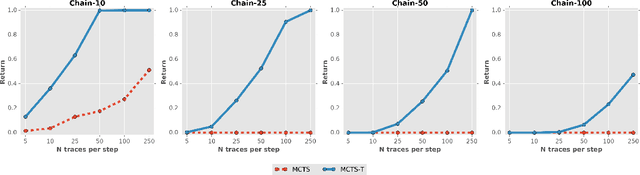

Monte Carlo Tree Search (MCTS) efficiently balances exploration and exploitation in tree search based on count-derived uncertainty. However, these local visit counts ignore a second type of uncertainty induced by the size of the subtree below an action. We first show how, due to the lack of this second uncertainty type, MCTS may completely fail in well-known sparse exploration problems, known from the reinforcement learning community. We then introduce a new algorithm, which estimates the size of the subtree below an action, and leverages this information in the UCB formula to better direct exploration. Subsequently, we generalize these ideas by showing that loops, i.e., the repeated occurrence of (approximately) the same state in the same trace, are actually a special case of subtree depth variation. Testing on a variety of tasks shows that our algorithms increase sample efficiency, especially when the planning budget per timestep is small.
Ordered Preference Elicitation Strategies for Supporting Multi-Objective Decision Making
Feb 21, 2018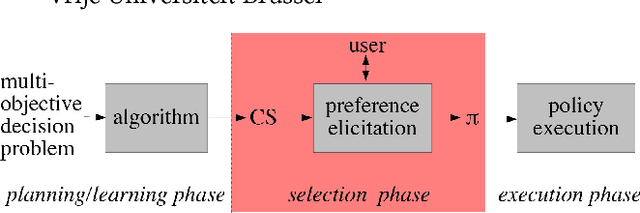

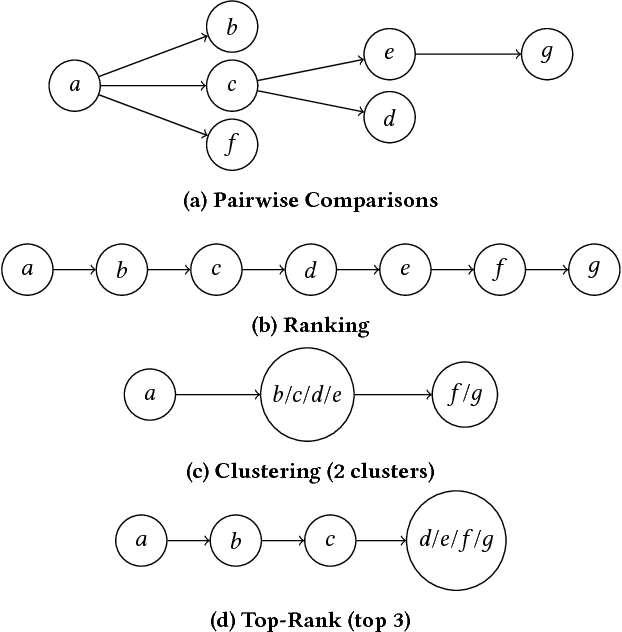
In multi-objective decision planning and learning, much attention is paid to producing optimal solution sets that contain an optimal policy for every possible user preference profile. We argue that the step that follows, i.e, determining which policy to execute by maximising the user's intrinsic utility function over this (possibly infinite) set, is under-studied. This paper aims to fill this gap. We build on previous work on Gaussian processes and pairwise comparisons for preference modelling, extend it to the multi-objective decision support scenario, and propose new ordered preference elicitation strategies based on ranking and clustering. Our main contribution is an in-depth evaluation of these strategies using computer and human-based experiments. We show that our proposed elicitation strategies outperform the currently used pairwise methods, and found that users prefer ranking most. Our experiments further show that utilising monotonicity information in GPs by using a linear prior mean at the start and virtual comparisons to the nadir and ideal points, increases performance. We demonstrate our decision support framework in a real-world study on traffic regulation, conducted with the city of Amsterdam.