 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUWB-Based Localization for Multi-UAV Systems and Collaborative Heterogeneous Multi-Robot Systems: a Survey
Apr 28, 2020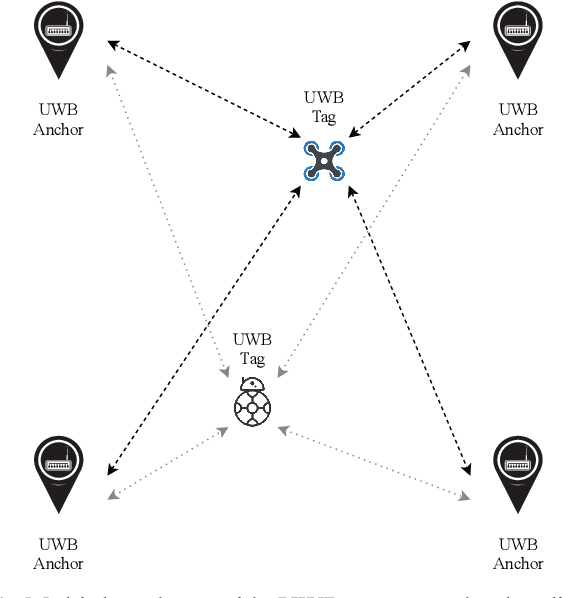

Ultra-wideband technology has emerged in recent years as a robust solution for localization in GNSS denied environments. In particular, its high accuracy when compared to other wireless localization solutions is enabling a wider range of collaborative and multi-robot application scenarios, being able to replace more complex and expensive motion-capture areas for use cases where accuracy in the order of tens of centimeters is sufficient. We present the first survey of UWB-based localization focused on multi-UAV systems and heterogeneous multi-robot systems. We have found that previous literature reviews do not consider in-depth the challenges in both aerial navigation and navigation with multiple robots, but also in terms of heterogeneous multi-robot systems. In particular, this is, to the best of our knowledge, the first survey to review recent advances in UWB-based (i) methods that enable ad-hoc and dynamic deployments; (ii) collaborative localization techniques; and (iii) cooperative sensing and cooperative maneuvers such as UAV docking on mobile platforms. Finally, we also review existing datasets and discuss the potential of this technology for both localization in GNSS-denied environments and collaboration in multi-robot systems.
Autocalibration of a Mobile UWB Localization System for Ad-Hoc Multi-Robot Deployments in GNSS-Denied Environments
Apr 14, 2020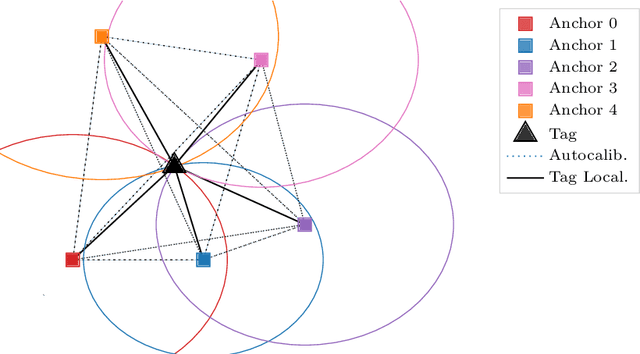

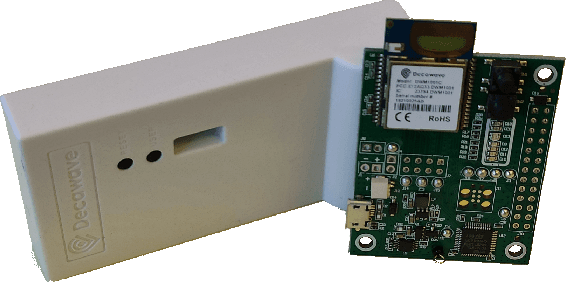
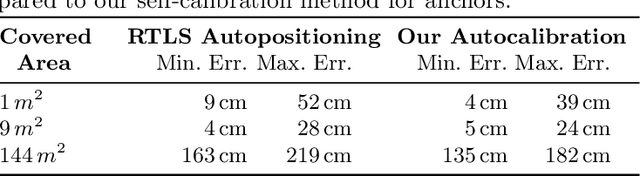
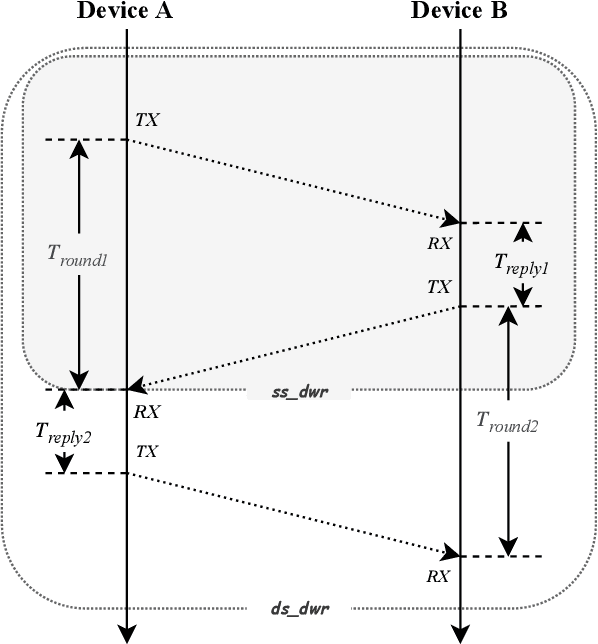
Ultra-wideband (UWB) wireless technology has seen an increased penetration in the robotics field as a robust localization method in recent years. UWB enables high accuracy distance estimation from time-of-flight measurements of wireless signals, even in non-line-of-sight measurements. UWB-based localization systems have been utilized in various types of GNSS-denied environments for ground or aerial autonomous robots. However, most of the existing solutions rely on a fixed and well-calibrated set of UWB nodes, or anchors, to estimate accurately the position of other mobile nodes, or tags, through multilateration. This limits the applicability of such systems for dynamic and ad-hoc deployments, such as post-disaster scenarios where the UWB anchors could be mounted on mobile robots to aid the navigation of UAVs or other robots. We introduce a collaborative algorithm for online autocalibration of anchor positions, enabling not only ad-hoc deployments but also movable anchors, based on Decawave's DWM1001 UWB module. Compared to the built-in autocalibration process from Decawave, we drastically reduce the amount of calibration time and increase the accuracy at the same time. We provide both experimental measurements and simulation results to demonstrate the usability of this algorithm.
UWB-based system for UAV Localization in GNSS-Denied Environments: Characterization and Dataset
Mar 09, 2020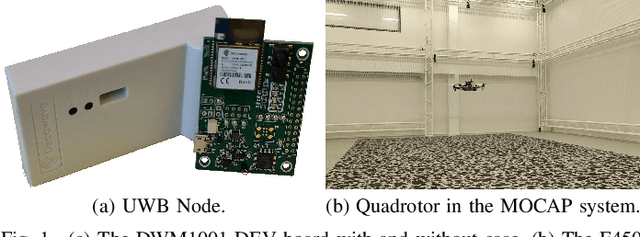
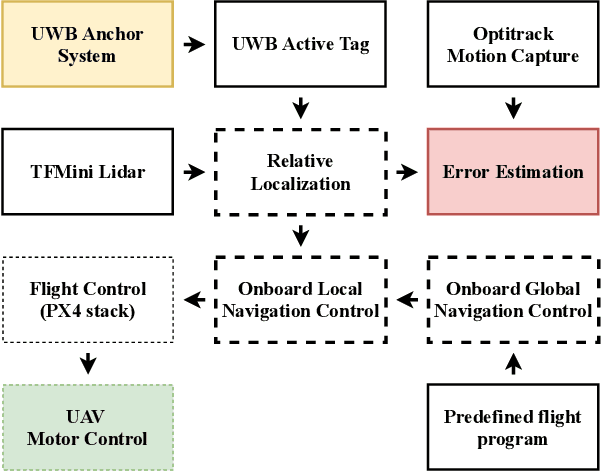
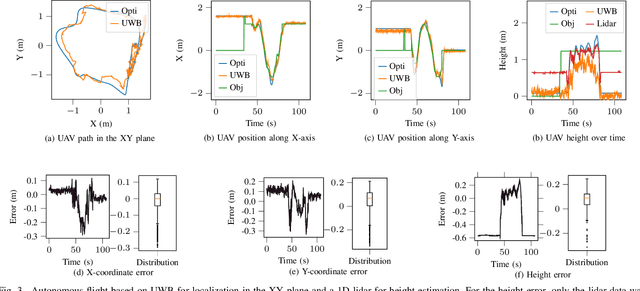
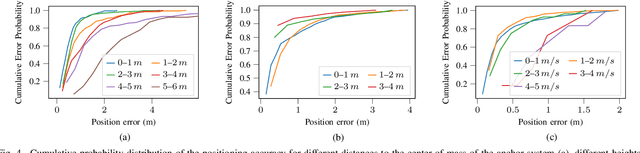
Small unmanned aerial vehicles (UAV) have penetrated multiple domains over the past years. In GNSS-denied or indoor environments, aerial robots require a robust and stable localization system, often with external feedback, in order to fly safely. Motion capture systems are typically utilized indoors when accurate localization is needed. However, these systems are expensive and most require a fixed setup. Recently, visual-inertial odometry and similar methods have advanced to a point where autonomous UAVs can rely on them for localization. The main limitation in this case comes from the environment, as well as in long-term autonomy due to accumulating error if loop closure cannot be performed efficiently. For instance, the impact of low visibility due to dust or smoke in post-disaster scenarios might render the odometry methods inapplicable. In this paper, we study and characterize an ultra-wideband (UWB) system for navigation and localization of aerial robots indoors based on Decawave's DWM1001 UWB node. The system is portable, inexpensive and can be battery powered in its totality. We show the viability of this system for autonomous flight of UAVs, and provide open-source methods and data that enable its widespread application even with movable anchor systems. We characterize the accuracy based on the position of the UAV with respect to the anchors, its altitude and speed, and the distribution of the anchors in space. Finally, we analyze the accuracy of the self-calibration of the anchors' positions.