 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Biologically Inspired Global Localization System for Mobile Robots Using LiDAR Sensor
Sep 27, 2021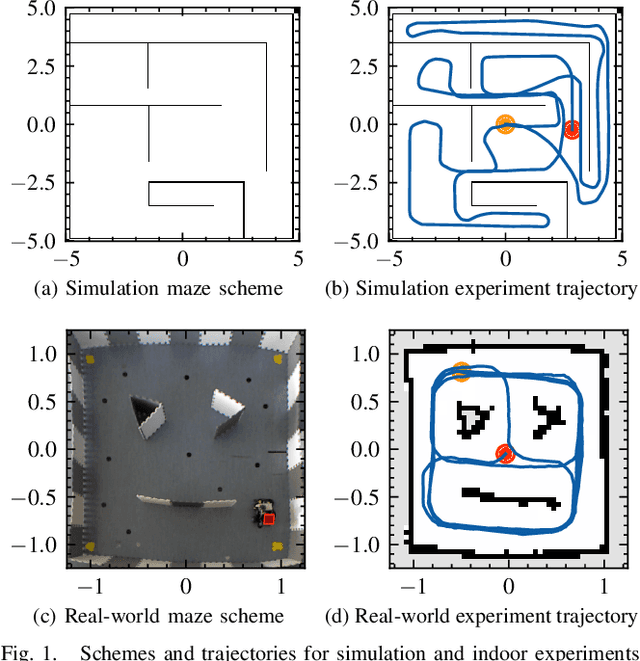

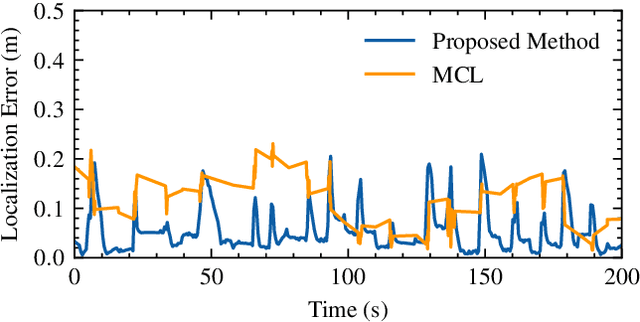
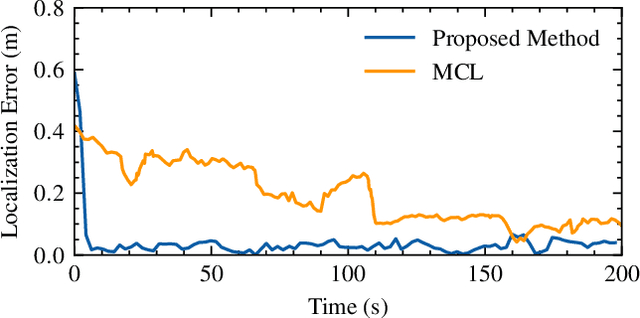
Localization in the environment is an essential navigational capability for animals and mobile robots. In the indoor environment, the global localization problem remains challenging to be perfectly solved with probabilistic methods. However, animals are able to instinctively localize themselves with much less effort. Therefore, it is intriguing and promising to seek biological inspiration from animals. In this paper, we present a biologically-inspired global localization system using a LiDAR sensor that utilizes a hippocampal model and a landmark-based re-localization approach. The experiment results show that the proposed method is competitive to Monte Carlo Localization, and the results demonstrate the high accuracy, applicability, and reliability of the proposed biologically-inspired localization system in different localization scenarios.