 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFree-Space Features: Global Localization in 2D Laser SLAM Using Distance Function Maps
Aug 05, 2019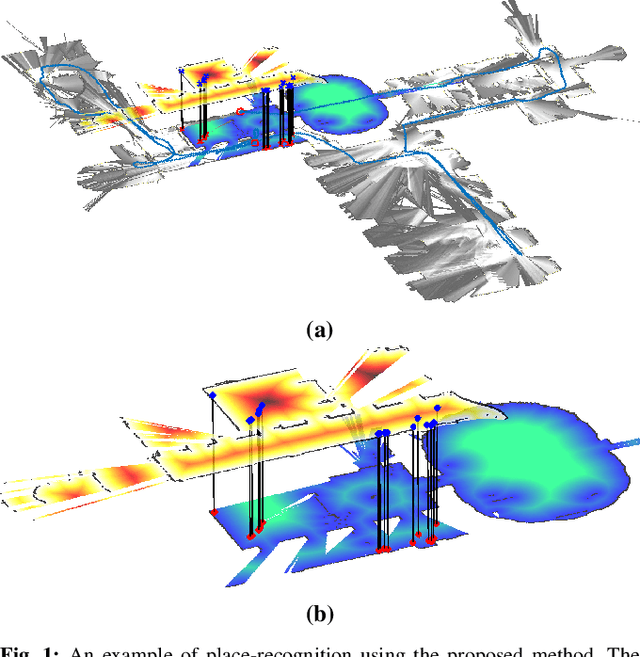
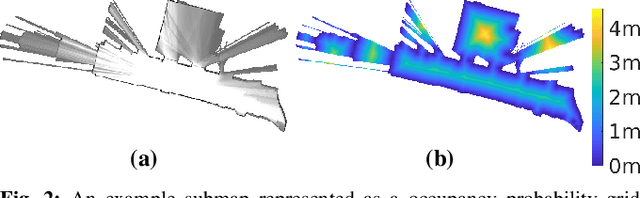
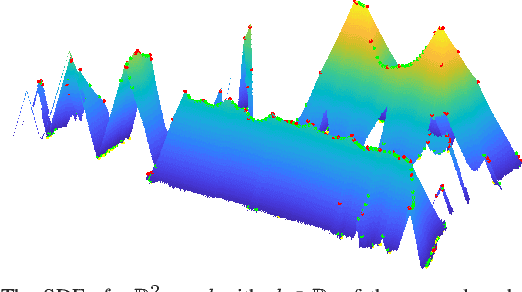
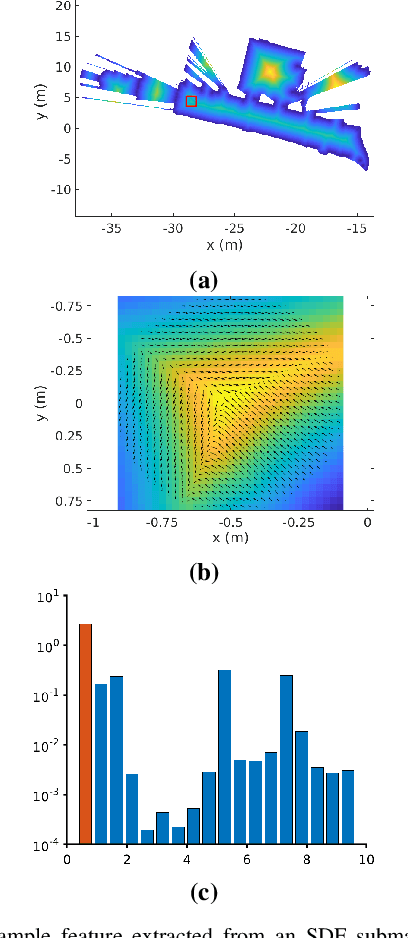
In many applications, maintaining a consistent map of the environment is key to enabling robotic platforms to perform higher-level decision making. Detection of already visited locations is one of the primary ways in which map consistency is maintained, especially in situations where external positioning systems are unavailable or unreliable. Mapping in 2D is an important field in robotics, largely due to the fact that man-made environments such as warehouses and homes, where robots are expected to play an increasing role, can often be approximated as planar. Place recognition in this context remains challenging: 2D lidar scans contain scant information with which to characterize, and therefore recognize, a location. This paper introduces a novel approach aimed at addressing this problem. At its core, the system relies on the use of the distance function for representation of geometry. This representation allows extraction of features which describe the geometry of both surfaces and free-space in the environment. We propose a feature for this purpose. Through evaluations on public datasets, we demonstrate the utility of free-space in the description of places, and show an increase in localization performance over a state-of-the-art descriptor extracted from surface geometry.
C-blox: A Scalable and Consistent TSDF-based Dense Mapping Approach
Sep 25, 2018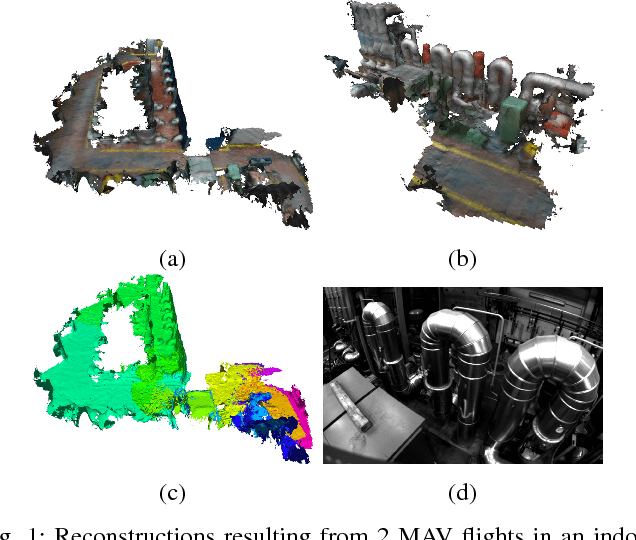
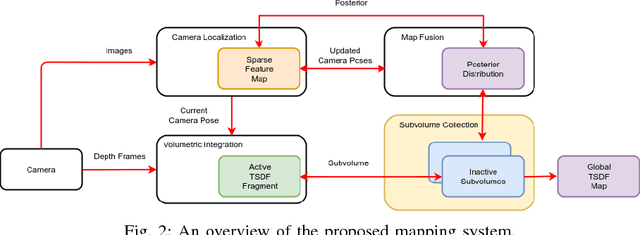


In many applications, maintaining a consistent dense map of the environment is key to enabling robotic platforms to perform higher level decision making. Several works have addressed the challenge of creating precise dense 3D maps from visual sensors providing depth information. However, during operation over longer missions, reconstructions can easily become inconsistent due to accumulated camera tracking error and delayed loop closure. Without explicitly addressing the problem of map consistency, recovery from such distortions tends to be difficult. We present a novel system for dense 3D mapping which addresses the challenge of building consistent maps while dealing with scalability. Central to our approach is the representation of the environment as a collection of overlapping TSDF subvolumes. These subvolumes are localized through feature-based camera tracking and bundle adjustment. Our main contribution is a pipeline for identifying stable regions in the map, and to fuse the contributing subvolumes. This approach allows us to reduce map growth while still maintaining consistency. We demonstrate the proposed system on a publicly available dataset and simulation engine, and demonstrate the efficacy of the proposed approach for building consistent and scalable maps. Finally we demonstrate our approach running in real-time on-board a lightweight MAV.