 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWi-Fi and Bluetooth Contact Tracing Without User Intervention
Mar 31, 2022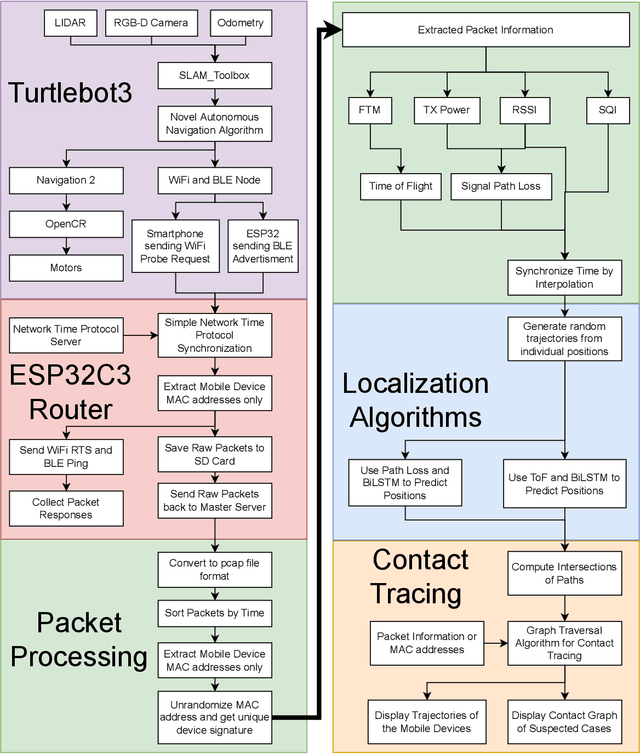
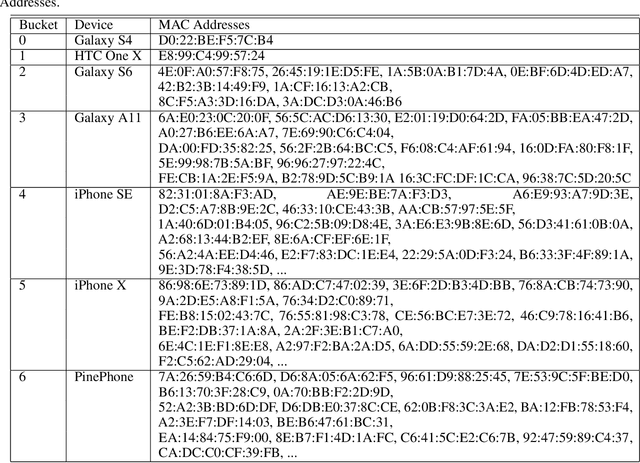
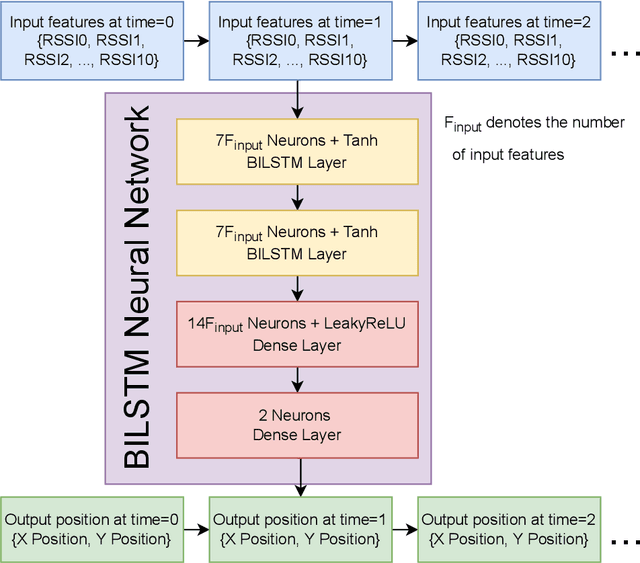
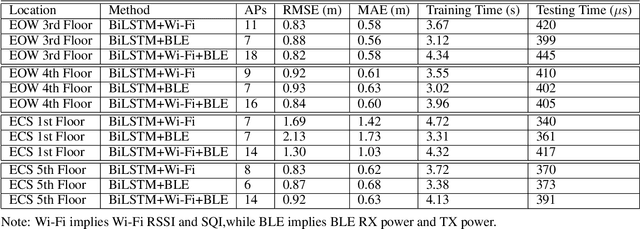
A custom Wi-Fi and Bluetooth indoor contact tracing system is created to find detailed paths of infected individuals without any user intervention. The system tracks smartphones, but it does not require smartphone applications, connecting to the routers, or any other extraneous devices on the users. A custom Turtlebot3 is used for site surveying, where it simulates mobile device movement and packet transmission. Transmit power, receive power, and round trip time are collected by a custom ESP32C3 router. MAC randomization is defeated to identify unique smartphones. Subsequently, the wireless parameters above are converted to signal path loss and time of flight. Bidirectional long short term memory takes the wireless parameters and predicts the detailed paths of the users within 1 m. Public health authorities can use the contact tracing website to find the detailed paths of the suspected cases using the smartphone models and initial positions of confirm cases. The system can also track indirect contact transmissions originating from surfaces and droplets due to having absolute positions of users.
Passive Indoor Localization with WiFi Fingerprints
Nov 29, 2021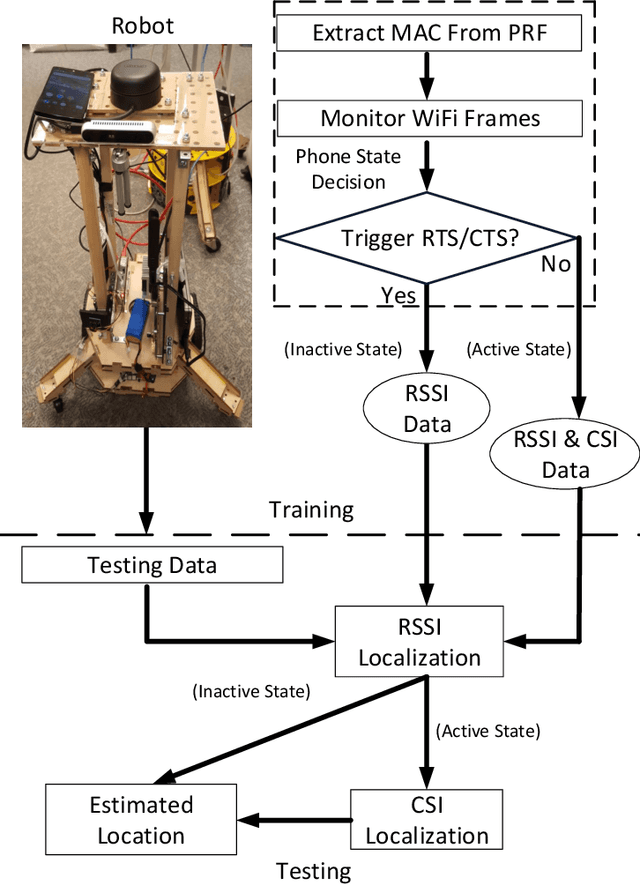
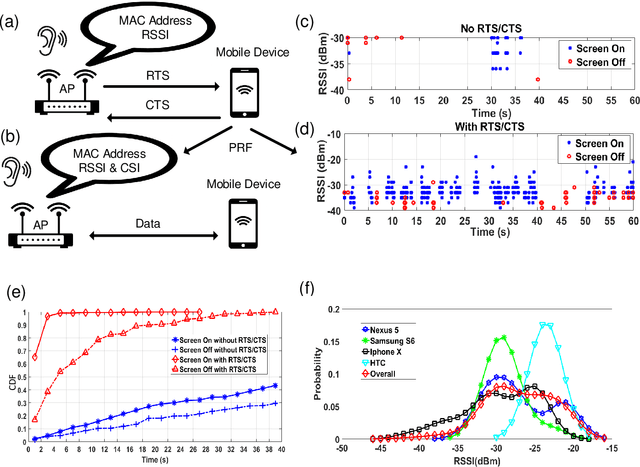
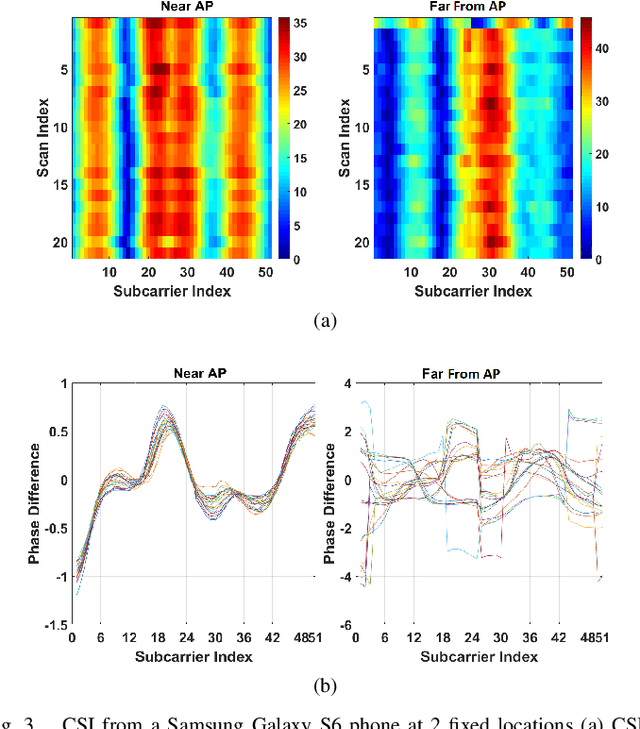
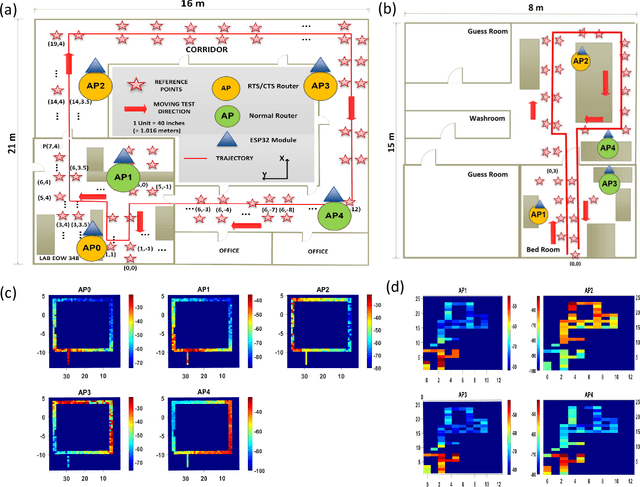
This paper proposes passive WiFi indoor localization. Instead of using WiFi signals received by mobile devices as fingerprints, we use signals received by routers to locate the mobile carrier. Consequently, software installation on the mobile device is not required. To resolve the data insufficiency problem, flow control signals such as request to send (RTS) and clear to send (CTS) are utilized. In our model, received signal strength indicator (RSSI) and channel state information (CSI) are used as fingerprints for several algorithms, including deterministic, probabilistic and neural networks localization algorithms. We further investigated localization algorithms performance through extensive on-site experiments with various models of phones at hundreds of testing locations. We demonstrate that our passive scheme achieves an average localization error of 0.8 m when the phone is actively transmitting data frames and 1.5 m when it is not transmitting data frames.
Universal Activation Function For Machine Learning
Nov 07, 2020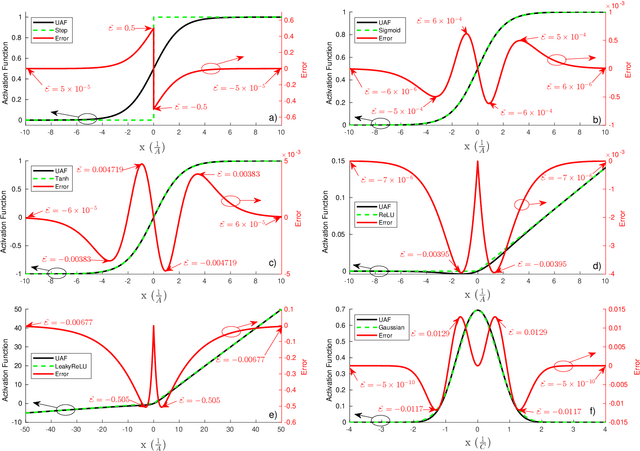
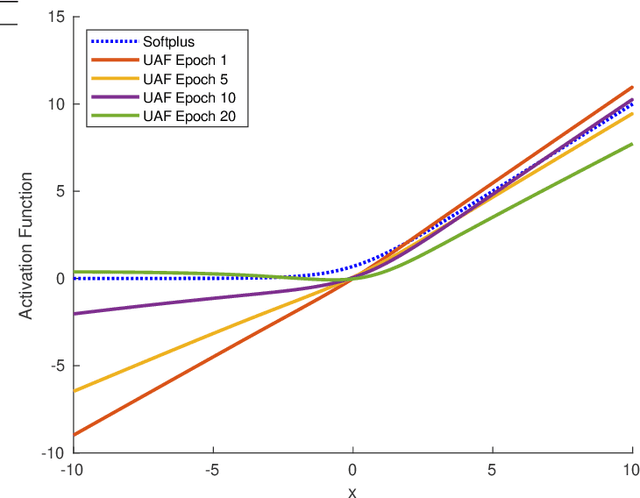
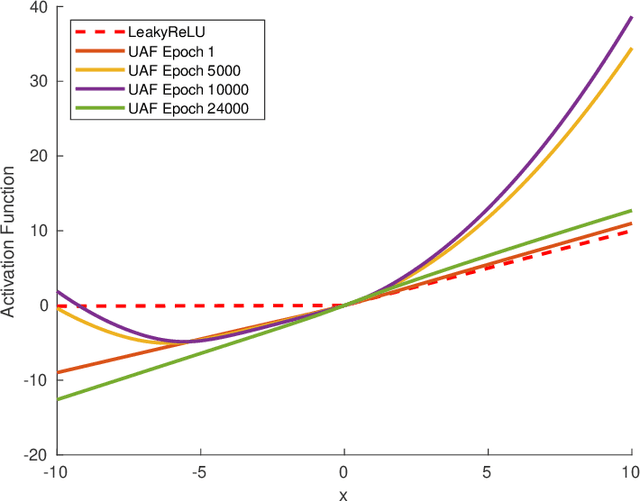
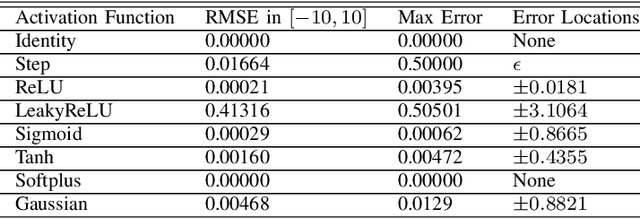
This article proposes a Universal Activation Function (UAF) that achieves near optimal performance in quantification, classification, and reinforcement learning (RL) problems. For any given problem, the optimization algorithms are able to evolve the UAF to a suitable activation function by tuning the UAF's parameters. For the CIFAR-10 classification and VGG-8, the UAF converges to the Mish like activation function, which has near optimal performance $F_{1} = 0.9017\pm0.0040$ when compared to other activation functions. For the quantification of simulated 9-gas mixtures in 30 dB signal-to-noise ratio (SNR) environments, the UAF converges to the identity function, which has near optimal root mean square error of $0.4888 \pm 0.0032$ $\mu M$. In the BipedalWalker-v2 RL dataset, the UAF achieves the 250 reward in $961 \pm 193$ epochs, which proves that the UAF converges in the lowest number of epochs. Furthermore, the UAF converges to a new activation function in the BipedalWalker-v2 RL dataset.
A CNN-LSTM Quantifier for Single Access Point CSI Indoor Localization
May 13, 2020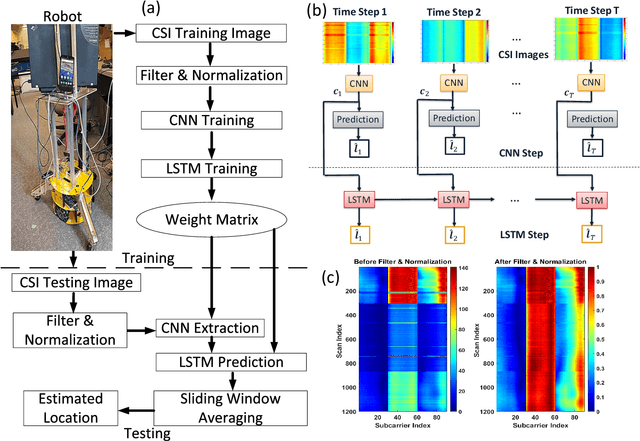
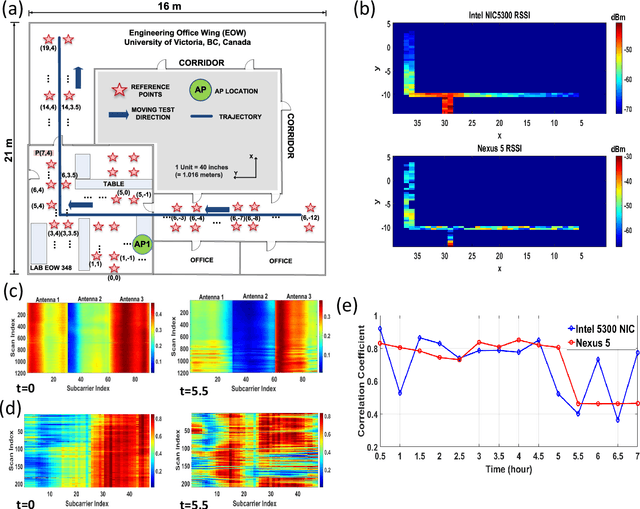
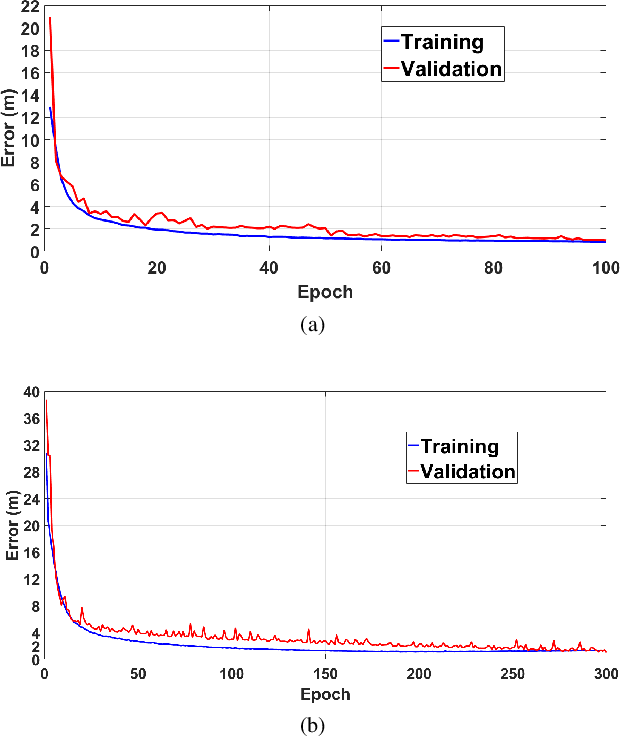
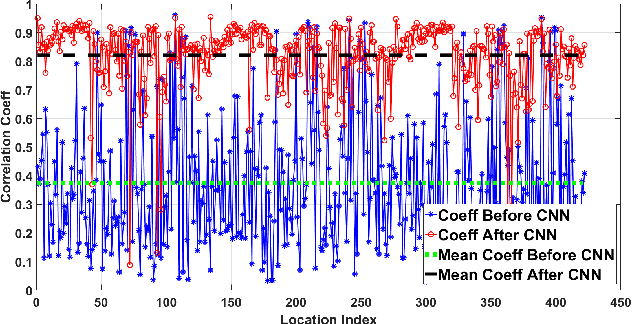
This paper proposes a combined network structure between convolutional neural network (CNN) and long-short term memory (LSTM) quantifier for WiFi fingerprinting indoor localization. In contrast to conventional methods that utilize only spatial data with classification models, our CNN-LSTM network extracts both space and time features of the received channel state information (CSI) from a single router. Furthermore, the proposed network builds a quantification model rather than a limited classification model as in most of the literature work, which enables the estimation of testing points that are not identical to the reference points. We analyze the instability of CSI and demonstrate a mitigation solution using a comprehensive filter and normalization scheme. The localization accuracy is investigated through extensive on-site experiments with several mobile devices including mobile phone (Nexus 5) and laptop (Intel 5300 NIC) on hundreds of testing locations. Using only a single WiFi router, our structure achieves an average localization error of 2.5~m with $\mathrm{80\%}$ of the errors under 4~m, which outperforms the other reported algorithms by approximately $\mathrm{50\%}$ under the same test environment.
Semi-Sequential Probabilistic Model For Indoor Localization Enhancement
Jan 08, 2020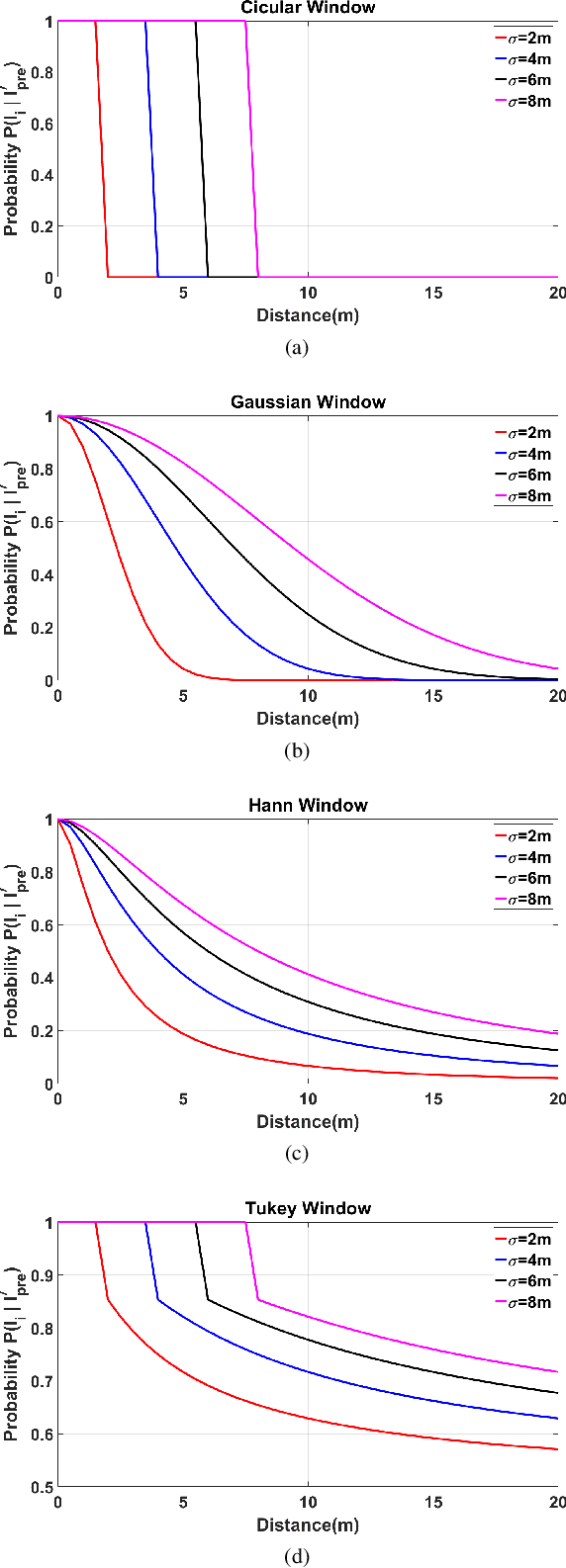
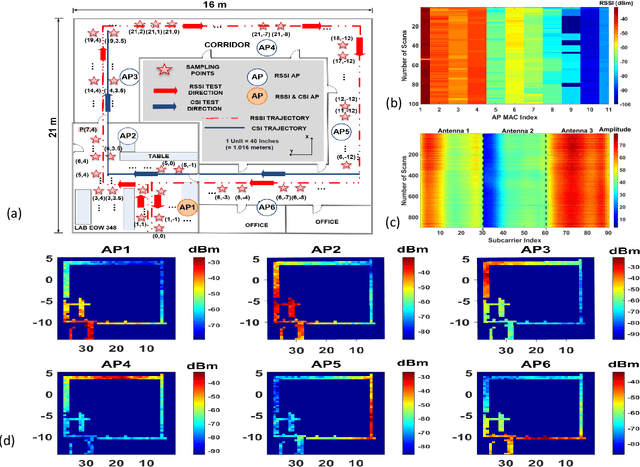
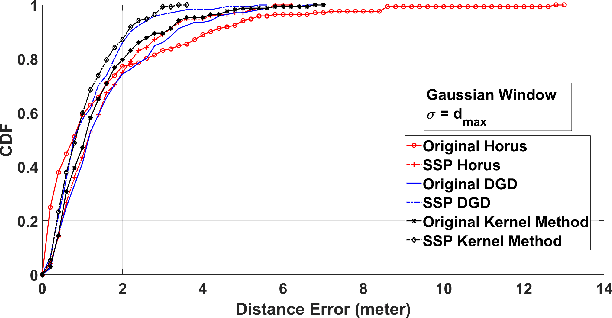
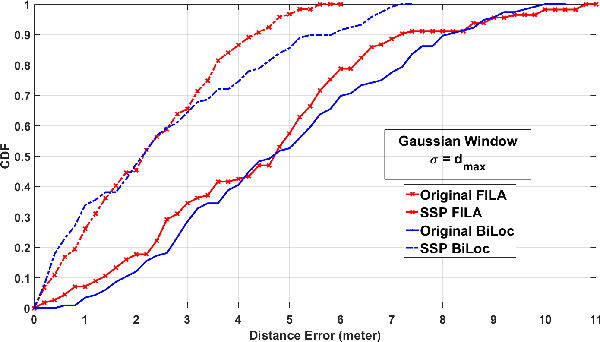
This paper proposes a semi-sequential probabilistic model (SSP) that applies an additional short term memory to enhance the performance of the probabilistic indoor localization. The conventional probabilistic methods normally treat the locations in the database indiscriminately. In contrast, SSP leverages the information of the previous position to determine the probable location since the user's speed in an indoor environment is bounded and locations near the previous one have higher probability than the other locations. Although the SSP utilizes the previous location information, it does not require the exact moving speed and direction of the user. On-site experiments using the received signal strength indicator (RSSI) and channel state information (CSI) fingerprints for localization demonstrate that SSP reduces the maximum error and boosts the performance of existing probabilistic approaches by 25% - 30%.
Hardware/Software Codesign for Training/Testing Multiple Neural Networks on Multiple FPGAs
Oct 13, 2019



Most neural network designs for FPGAs are inflexible. In this paper, we propose a flexible VHDL structure that would allow any neural network to be implemented on multiple FPGAs. Moreover, the VHDL structure allows for testing as well as training multiple neural networks. The VHDL design consists of multiple processor groups. There are two types of processor groups: Mini Vector Machine Processor Group and Activation Processor Group. Each processor group consists of individual Mini Vector Machines and Activation Processor. The Mini Vector Machines apply vector operations to the data, while the Activation Processors apply activation functions to the data. A ring buffer was implemented to connect the various processor groups.
Classifying Multi-Gas Spectrums using Monte Carlo KNN and Multi-Resolution CNN
Jul 10, 2019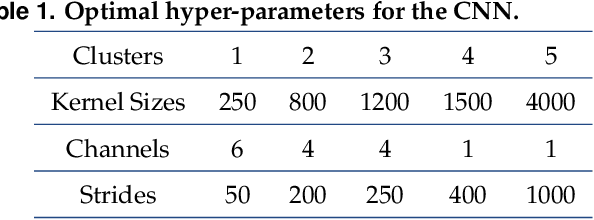
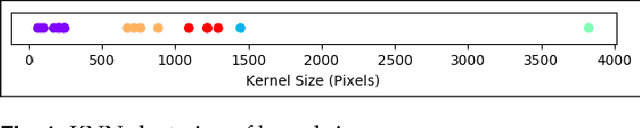


A Monte Carlo k-nearest neighbours (KNN) and a multi-resolution convolutional neural network (CNN) were developed to detect the presences of multiple gasses in near infrared (IR) spectrums. High Resolution Transmission database was used to synthesize the near IR spectrums. Monte Carlo KNN determined the optimal kernel sizes and the optimal number of channels. The multi-resolution CNN, composed of multiple different kernels, was created using the optimal kernel sizes and the optimal number of channels. The multi-resolution CNN outperforms the multilayer perceptron and the partial least squares.
Multi-label Classification with Optimal Thresholding for Multi-composition Spectroscopic Analysis
Jun 24, 2019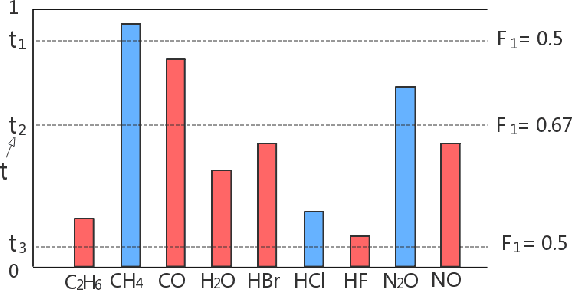
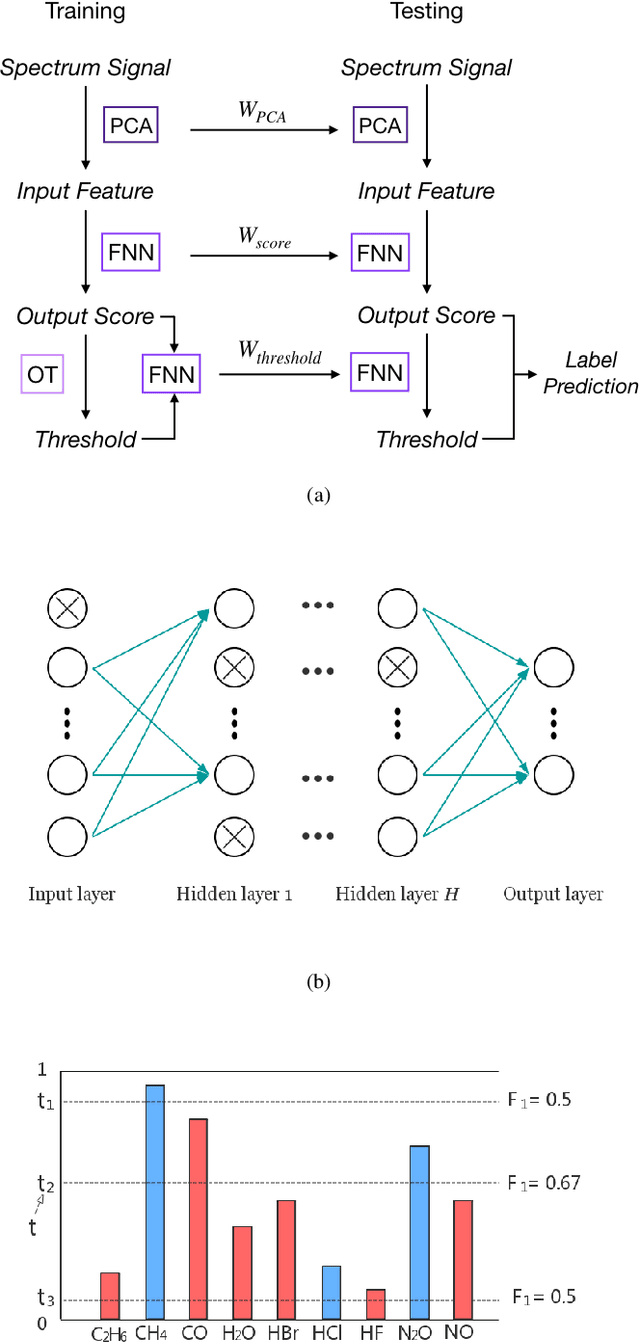

In this paper, we implement multi-label neural networks with optimal thresholding to identify gas species among a multi gas mixture in a cluttered environment. Using infrared absorption spectroscopy and tested on synthesized spectral datasets, our approach outperforms conventional binary relevance - partial least squares discriminant analysis when signal-to-noise ratio and training sample size are sufficient.
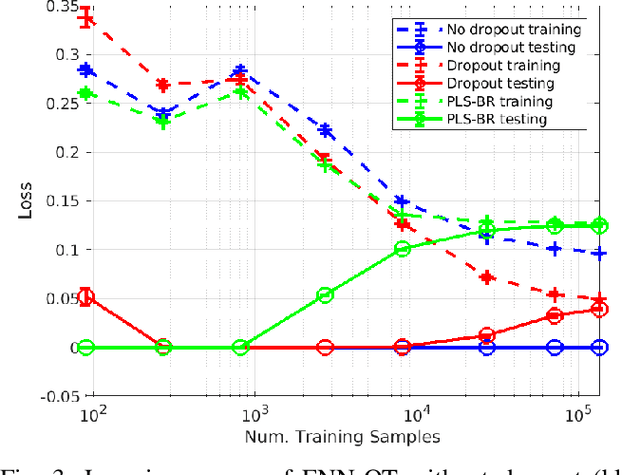
Recurrent Neural Networks For Accurate RSSI Indoor Localization
Mar 27, 2019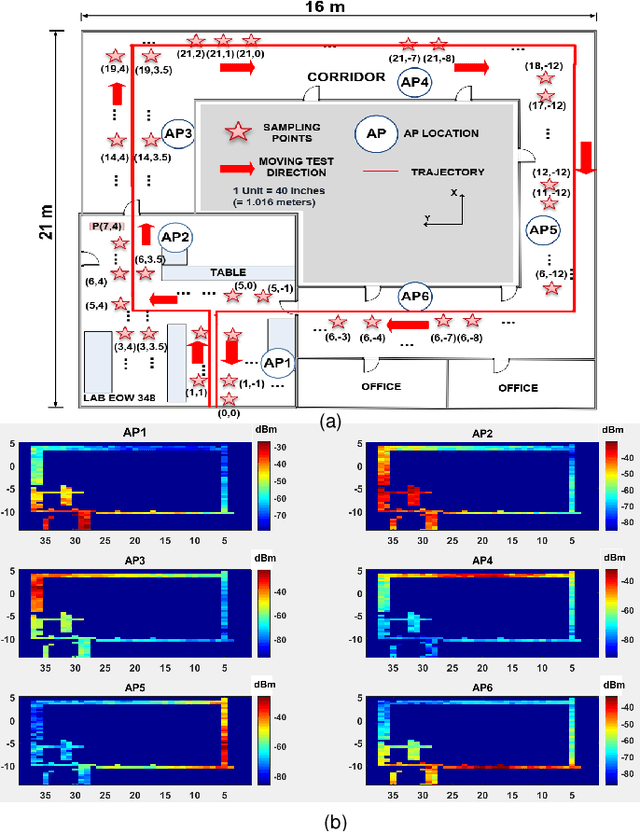
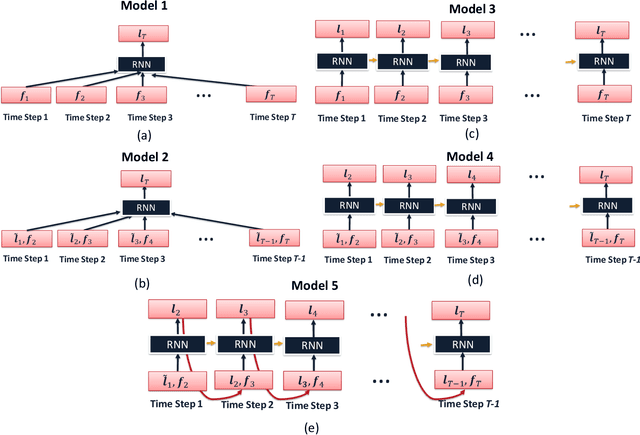
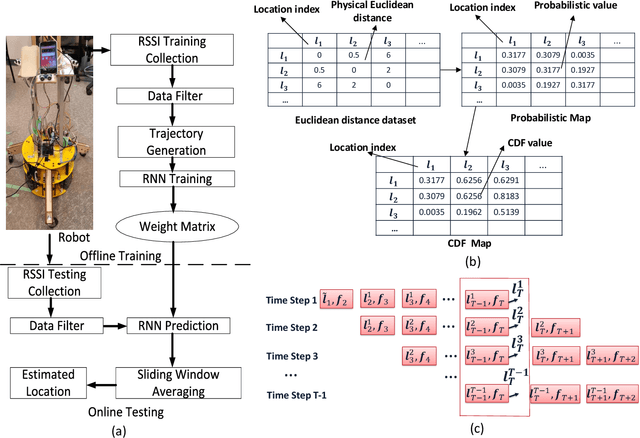
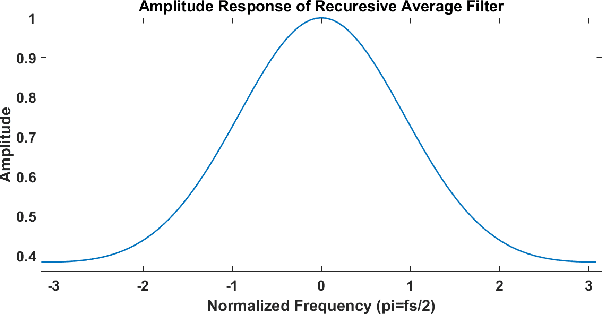
This paper proposes recurrent neuron networks (RNNs) for a fingerprinting indoor localization using WiFi. Instead of locating user's position one at a time as in the cases of conventional algorithms, our RNN solution aims at trajectory positioning and takes into account the relation among the received signal strength indicator (RSSI) measurements in a trajectory. Furthermore, a weighted average filter is proposed for both input RSSI data and sequential output locations to enhance the accuracy among the temporal fluctuations of RSSI. The results using different types of RNN including vanilla RNN, long short-term memory (LSTM), gated recurrent unit (GRU) and bidirectional LSTM (BiLSTM) are presented. On-site experiments demonstrate that the proposed structure achieves an average localization error of $0.75$ m with $80\%$ of the errors under $1$ m, which outperforms the conventional KNN algorithms and probabilistic algorithms by approximately $30\%$ under the same test environment.