 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTumorMap: A Laser-based Surgical Platform for 3D Tumor Mapping and Fully-Automated Tumor Resection
Nov 07, 2025Surgical resection of malignant solid tumors is critically dependent on the surgeon's ability to accurately identify pathological tissue and remove the tumor while preserving surrounding healthy structures. However, building an intraoperative 3D tumor model for subsequent removal faces major challenges due to the lack of high-fidelity tumor reconstruction, difficulties in developing generalized tissue models to handle the inherent complexities of tumor diagnosis, and the natural physical limitations of bimanual operation, physiologic tremor, and fatigue creep during surgery. To overcome these challenges, we introduce "TumorMap", a surgical robotic platform to formulate intraoperative 3D tumor boundaries and achieve autonomous tissue resection using a set of multifunctional lasers. TumorMap integrates a three-laser mechanism (optical coherence tomography, laser-induced endogenous fluorescence, and cutting laser scalpel) combined with deep learning models to achieve fully-automated and noncontact tumor resection. We validated TumorMap in murine osteoscarcoma and soft-tissue sarcoma tumor models, and established a novel histopathological workflow to estimate sensor performance. With submillimeter laser resection accuracy, we demonstrated multimodal sensor-guided autonomous tumor surgery without any human intervention.
3D Laser-and-tissue Agnostic Data-driven Method for Robotic Laser Surgical Planning
May 02, 2023In robotic laser surgery, shape prediction of an one-shot ablation cavity is an important problem for minimizing errant overcutting of healthy tissue during the course of pathological tissue resection and precise tumor removal. Since it is difficult to physically model the laser-tissue interaction due to the variety of optical tissue properties, complicated process of heat transfer, and uncertainty about the chemical reaction, we propose a 3D cavity prediction model based on an entirely data-driven method without any assumptions of laser settings and tissue properties. Based on the cavity prediction model, we formulate a novel robotic laser planning problem to determine the optimal laser incident configuration, which aims to create a cavity that aligns with the surface target (e.g. tumor, pathological tissue). To solve the one-shot ablation cavity prediction problem, we model the 3D geometric relation between the tissue surface and the laser energy profile as a non-linear regression problem that can be represented by a single-layer perceptron (SLP) network. The SLP network is encoded in a novel kinematic model to predict the shape of the post-ablation cavity with an arbitrary laser input. To estimate the SLP network parameters, we formulate a dataset of one-shot laser-phantom cavities reconstructed by the optical coherence tomography (OCT) B-scan images for the data-driven modelling. To verify the method. The learned cavity prediction model is applied to solve a simplified robotic laser planning problem modelled as a surface alignment error minimization problem. The initial results report (91.1 +- 3.0)% 3D-cavity-Intersection-over-Union (3D-cavity-IoU) for the 3D cavity prediction and an average of 97.9% success rate for the simulated surface alignment experiments.
Transfer Learning for Autonomous Chatter Detection in Machining
Apr 11, 2022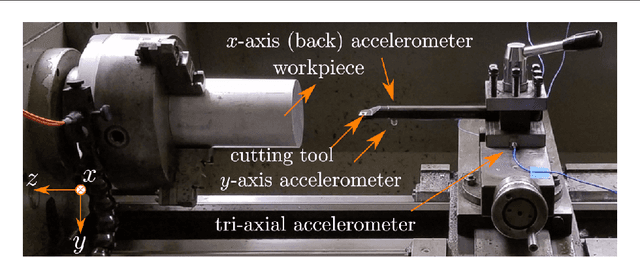
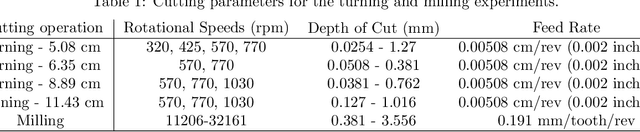
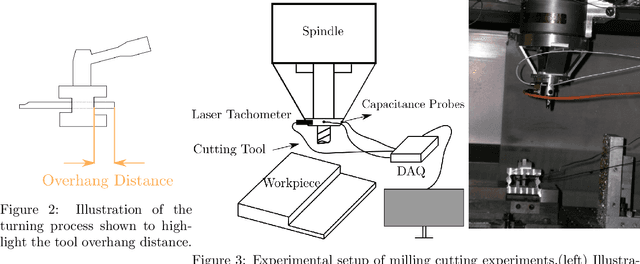
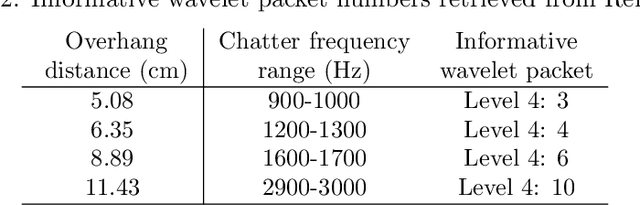
Large-amplitude chatter vibrations are one of the most important phenomena in machining processes. It is often detrimental in cutting operations causing a poor surface finish and decreased tool life. Therefore, chatter detection using machine learning has been an active research area over the last decade. Three challenges can be identified in applying machine learning for chatter detection at large in industry: an insufficient understanding of the universality of chatter features across different processes, the need for automating feature extraction, and the existence of limited data for each specific workpiece-machine tool combination. These three challenges can be grouped under the umbrella of transfer learning. This paper studies automating chatter detection by evaluating transfer learning of prominent as well as novel chatter detection methods. We investigate chatter classification accuracy using a variety of features extracted from turning and milling experiments with different cutting configurations. The studied methods include Fast Fourier Transform (FFT), Power Spectral Density (PSD), the Auto-correlation Function (ACF), Wavelet Packet Transform (WPT), and Ensemble Empirical Mode Decomposition (EEMD). We also examine more recent approaches based on Topological Data Analysis (TDA) and similarity measures of time series based on Discrete Time Warping (DTW). We evaluate the transfer learning potential of each approach by training and testing both within and across the turning and milling data sets. Our results show that carefully chosen time-frequency features can lead to high classification accuracies albeit at the cost of requiring manual pre-processing and the tagging of an expert user. On the other hand, we found that the TDA and DTW approaches can provide accuracies and F1 scores on par with the time-frequency methods without the need for manual preprocessing.