 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperation of Multiple Autonomous Robots and Analysis of their Swarm Behavior
Dec 28, 2018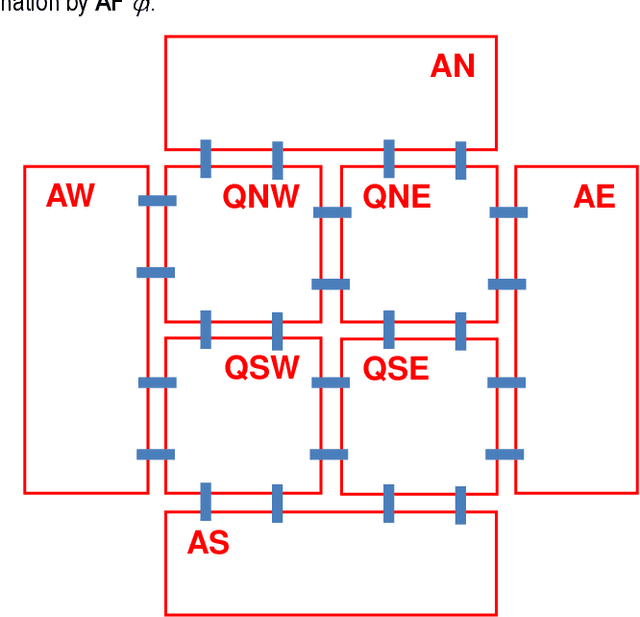
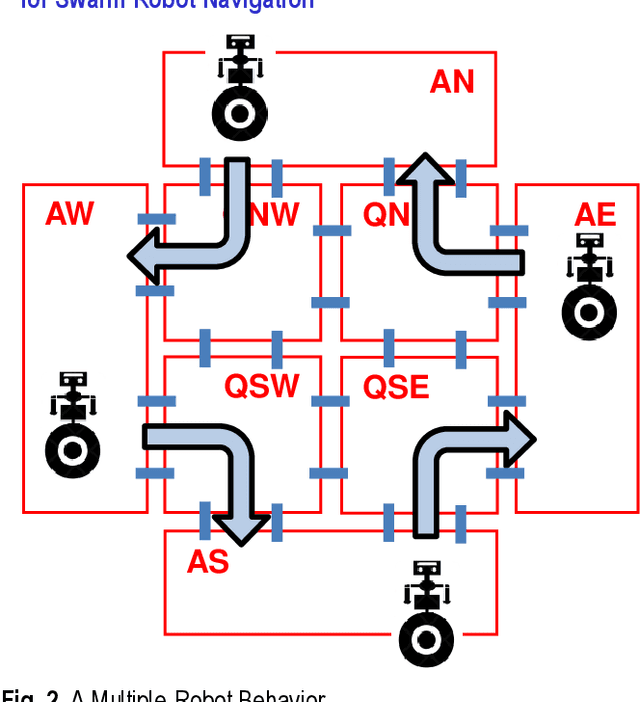
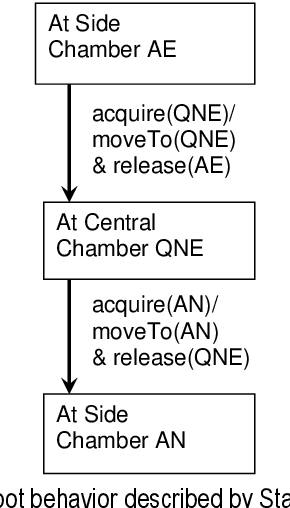
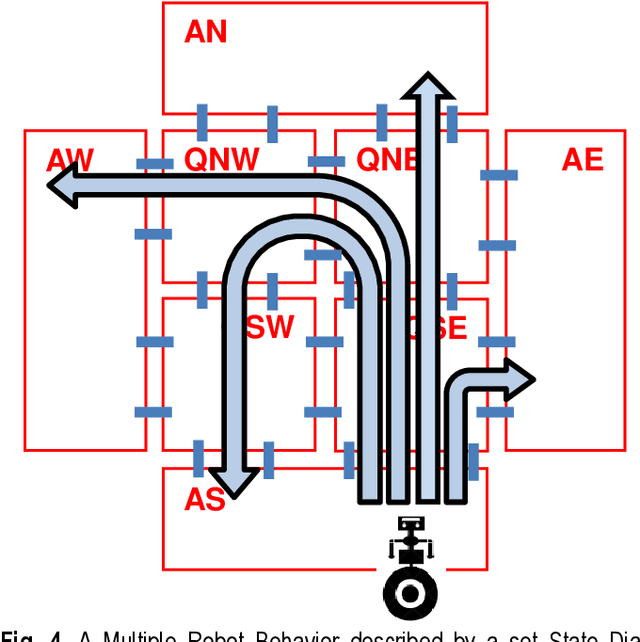
In this paper, we extended previous studies of cooperating autonomous robots to include situations when environmental changes and changes in the number of robots in the swarm can affect the efficiency to execute tasks assigned to the swarm of robots. We have presented a novel approach based on partition of the robot behavior. The sub-diagrams describing sub-routs allowed us to model advanced interactions between autonomous robots using limited number of state combinations avoiding combinatorial explosion of reachability. We identified the systems for which we can ensure the correctness of robots interactions. New techniques were presented to verify and analyze combined robots' behavior. The partitioned diagrams allowed us to model advanced interactions between autonomous robots and detect irregularities such as deadlocks, lack of termination etc. The techniques were presented to verify and analyze combined robots' behavior using model checking approach. The described system, Dedan verifier, is still under development. In the near future, timed and probabilistic verification are planned.
* 8 pages, 10 figures. arXiv admin note: text overlap with arXiv:1705.04263
PACE: Pattern Accurate Computationally Efficient Bootstrapping for Timely Discovery of Cyber-Security Concepts
Oct 11, 2013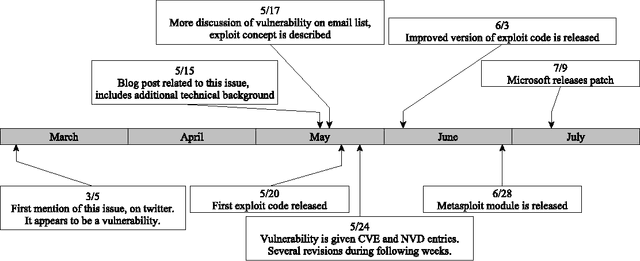
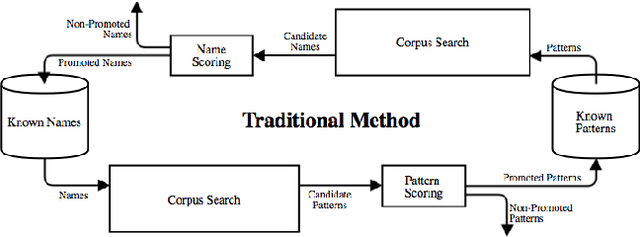
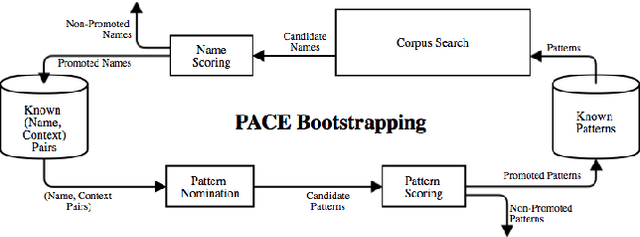

Public disclosure of important security information, such as knowledge of vulnerabilities or exploits, often occurs in blogs, tweets, mailing lists, and other online sources months before proper classification into structured databases. In order to facilitate timely discovery of such knowledge, we propose a novel semi-supervised learning algorithm, PACE, for identifying and classifying relevant entities in text sources. The main contribution of this paper is an enhancement of the traditional bootstrapping method for entity extraction by employing a time-memory trade-off that simultaneously circumvents a costly corpus search while strengthening pattern nomination, which should increase accuracy. An implementation in the cyber-security domain is discussed as well as challenges to Natural Language Processing imposed by the security domain.