 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperation of Multiple Autonomous Robots and Analysis of their Swarm Behavior
Dec 28, 2018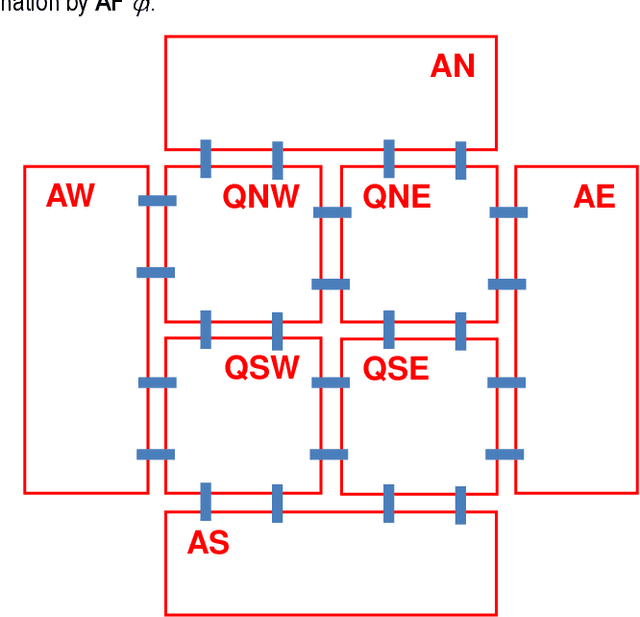
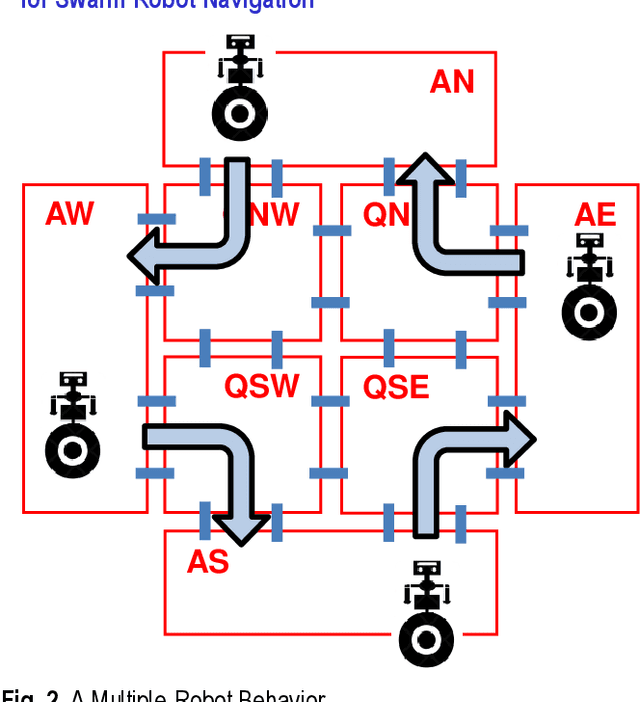
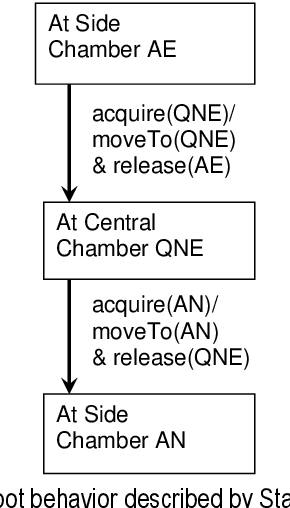
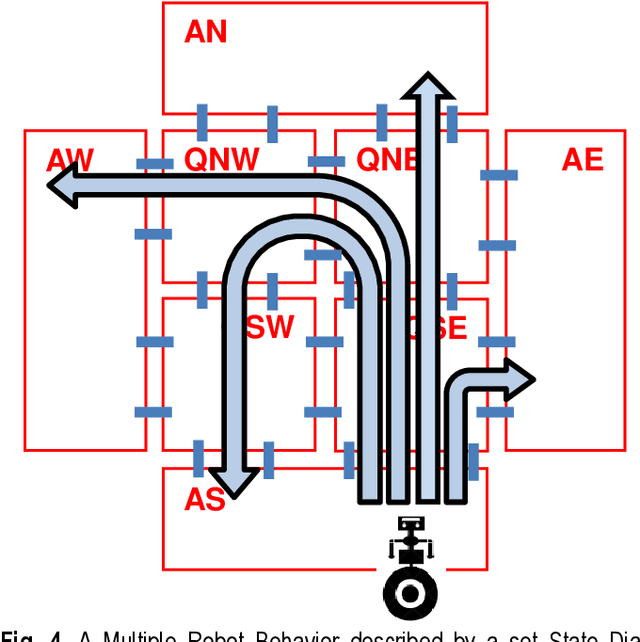
In this paper, we extended previous studies of cooperating autonomous robots to include situations when environmental changes and changes in the number of robots in the swarm can affect the efficiency to execute tasks assigned to the swarm of robots. We have presented a novel approach based on partition of the robot behavior. The sub-diagrams describing sub-routs allowed us to model advanced interactions between autonomous robots using limited number of state combinations avoiding combinatorial explosion of reachability. We identified the systems for which we can ensure the correctness of robots interactions. New techniques were presented to verify and analyze combined robots' behavior. The partitioned diagrams allowed us to model advanced interactions between autonomous robots and detect irregularities such as deadlocks, lack of termination etc. The techniques were presented to verify and analyze combined robots' behavior using model checking approach. The described system, Dedan verifier, is still under development. In the near future, timed and probabilistic verification are planned.
* 8 pages, 10 figures. arXiv admin note: text overlap with arXiv:1705.04263
Distributed algorithm for empty vehicles management in personal rapid transit (PRT) network
Oct 17, 2017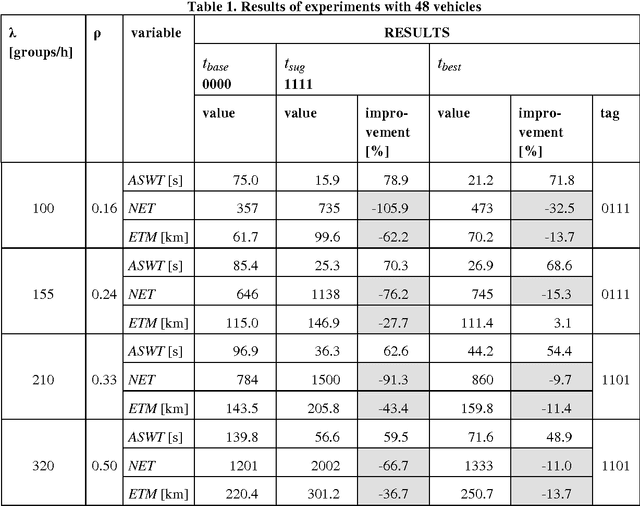
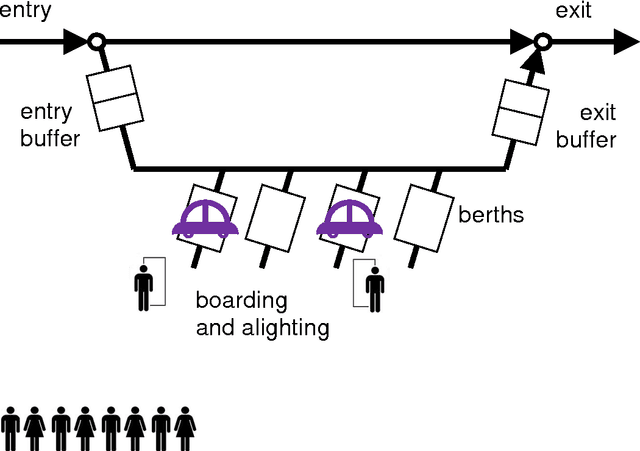
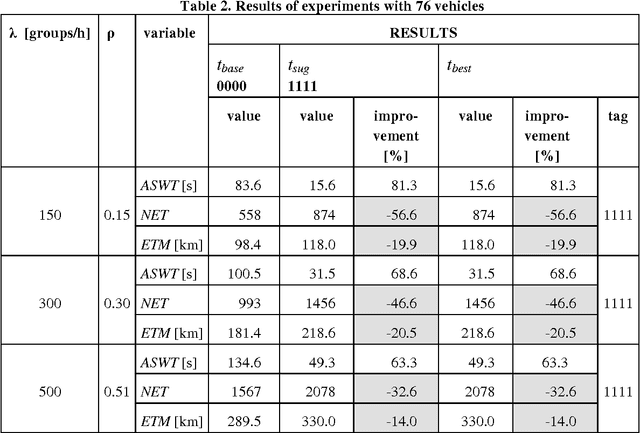
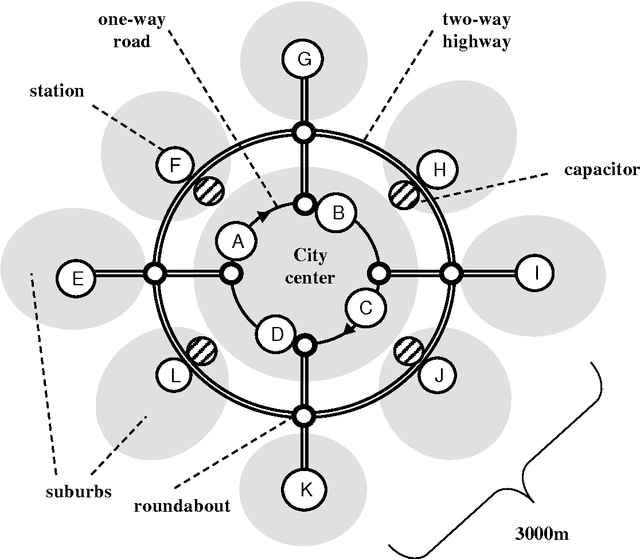
In this paper, an original heuristic algorithm of empty vehicles management in personal rapid transit network is presented. The algorithm is used for the delivery of empty vehicles for waiting passengers, for balancing the distribution of empty vehicles within the network, and for providing an empty space for vehicles approaching a station. Each of these tasks involves a decision on the trip that has to be done by a selected empty vehicle from its actual location to some determined destination. The decisions are based on a multi-parameter function involving a set of factors and thresholds. An important feature of the algorithm is that it does not use any central database of passenger input (demand) and locations of free vehicles. Instead, it is based on the local exchange of data between stations: on their states and on the vehicles they expect. Therefore, it seems well-tailored for a distributed implementation. The algorithm is uniform, meaning that the same basic procedure is used for multiple tasks using a task-specific set of parameters.
* 22 pages, 6 figures, 5 tables