 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Legibility in Multiagent Reinforcement Learning
Oct 28, 2024



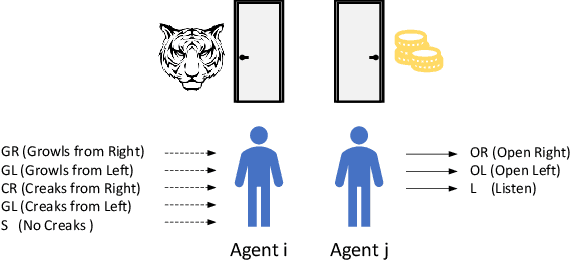
A multiagent sequential decision problem has been seen in many critical applications including urban transportation, autonomous driving cars, military operations, etc. Its widely known solution, namely multiagent reinforcement learning, has evolved tremendously in recent years. Among them, the solution paradigm of modeling other agents attracts our interest, which is different from traditional value decomposition or communication mechanisms. It enables agents to understand and anticipate others' behaviors and facilitates their collaboration. Inspired by recent research on the legibility that allows agents to reveal their intentions through their behavior, we propose a multiagent active legibility framework to improve their performance. The legibility-oriented framework allows agents to conduct legible actions so as to help others optimise their behaviors. In addition, we design a series of problem domains that emulate a common scenario and best characterize the legibility in multiagent reinforcement learning. The experimental results demonstrate that the new framework is more efficient and costs less training time compared to several multiagent reinforcement learning algorithms.
Diversifying Agent's Behaviors in Interactive Decision Models
Mar 06, 2022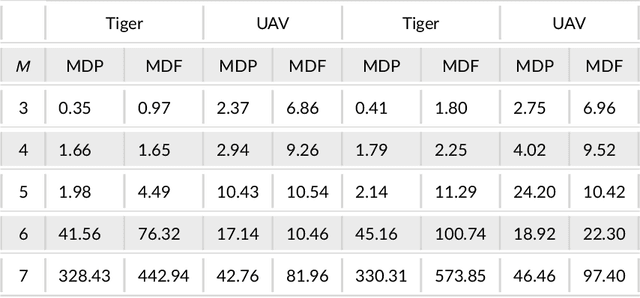
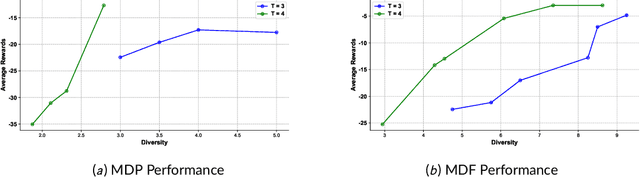
Modelling other agents' behaviors plays an important role in decision models for interactions among multiple agents. To optimise its own decisions, a subject agent needs to model what other agents act simultaneously in an uncertain environment. However, modelling insufficiency occurs when the agents are competitive and the subject agent can not get full knowledge about other agents. Even when the agents are collaborative, they may not share their true behaviors due to their privacy concerns. In this article, we investigate into diversifying behaviors of other agents in the subject agent's decision model prior to their interactions. Starting with prior knowledge about other agents' behaviors, we use a linear reduction technique to extract representative behavioral features from the known behaviors. We subsequently generate their new behaviors by expanding the features and propose two diversity measurements to select top-K behaviors. We demonstrate the performance of the new techniques in two well-studied problem domains. This research will contribute to intelligent systems dealing with unknown unknowns in an open artificial intelligence world.
Tensor Decomposition for Multi-agent Predictive State Representation
May 27, 2020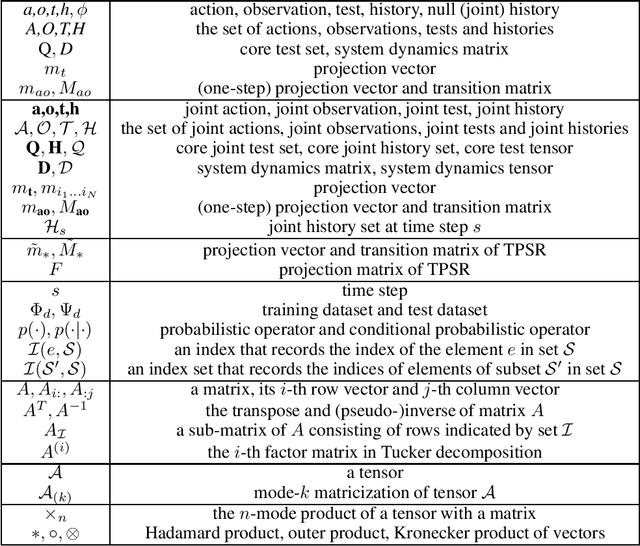
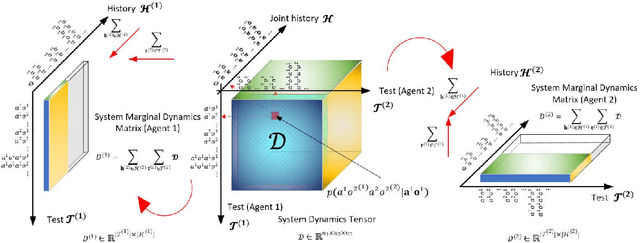
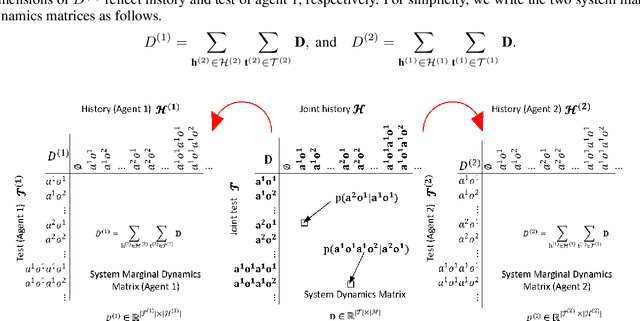

Predictive state representation~(PSR) uses a vector of action-observation sequence to represent the system dynamics and subsequently predicts the probability of future events. It is a concise knowledge representation that is well studied in a single-agent planning problem domain. To the best of our knowledge, there is no existing work on using PSR to solve multi-agent planning problems. Learning a multi-agent PSR model is quite difficult especially with the increasing number of agents, not to mention the complexity of a problem domain. In this paper, we resort to tensor techniques to tackle the challenging task of multi-agent PSR model development problems. By first focusing on a two-agent setting, we construct the system dynamics matrix as a high order tensor for a PSR model, learn the prediction parameters and deduce state vectors directly through two different tensor decomposition methods respectively, and derive the transition parameters via linear regression. Subsequently, we generalize the PSR learning approaches in a multi-agent setting. Experimental results show that our methods can effectively solve multi-agent PSR modelling problems in multiple problem domains.