 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLang2LTL: Translating Natural Language Commands to Temporal Robot Task Specification
Feb 22, 2023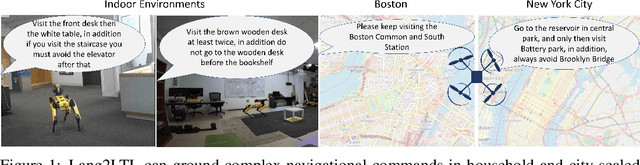


Natural language provides a powerful modality to program robots to perform temporal tasks. Linear temporal logic (LTL) provides unambiguous semantics for formal descriptions of temporal tasks. However, existing approaches cannot accurately and robustly translate English sentences to their equivalent LTL formulas in unseen environments. To address this problem, we propose Lang2LTL, a novel modular system that leverages pretrained large language models to first extract referring expressions from a natural language command, then ground the expressions to real-world landmarks and objects, and finally translate the command into an LTL task specification for the robot. It enables any robotic system to interpret natural language navigation commands without additional training, provided that it tracks its position and has a semantic map with landmarks labeled with free-form text. We demonstrate the state-of-the-art ability to generalize to multi-scale navigation domains such as OpenStreetMap (OSM) and CleanUp World (a simulated household environment). Lang2LTL achieves an average accuracy of 88.4% in translating challenging LTL formulas in 22 unseen OSM environments as evaluated on a new corpus of over 10,000 commands, 22 times better than the previous SoTA. Without modification, the best performing Lang2LTL model on the OSM dataset can translate commands in CleanUp World with 82.8% accuracy. As a part of our proposed comprehensive evaluation procedures, we collected a new labeled dataset of English commands representing 2,125 unique LTL formulas, the largest ever dataset of natural language commands to LTL specifications for robotic tasks with the most diverse LTL formulas, 40 times more than previous largest dataset. Finally, we integrated Lang2LTL with a planner to command a quadruped mobile robot to perform multi-step navigational tasks in an analog real-world environment created in the lab.