 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Graph Neural Networks for Uncertainty Quantification in Inverse Problems
Mar 31, 2026The increasingly wide use of deep machine learning techniques in computational mechanics has significantly accelerated simulations of problems that were considered unapproachable just a few years ago. However, in critical applications such as Digital Twins for engineering or medicine, fast responses are not enough; reliable results must also be provided. In certain cases, traditional deterministic methods may not be optimal as they do not provide a measure of confidence in their predictions or results, especially in inverse problems where the solution may not be unique or the initial data may not be entirely reliable due to the presence of noise, for instance. Classic deep neural networks also lack a clear measure to quantify the uncertainty of their predictions. In this work, we present a variational graph neural network (VGNN) architecture that integrates variational layers into its architecture to model the probability distribution of weights. Unlike computationally expensive full Bayesian networks, our approach strategically introduces variational layers exclusively in the decoder, allowing us to estimate cognitive uncertainty and statistical uncertainty at a relatively lower cost. In this work, we validate the proposed methodology in two cases of solid mechanics: the identification of the value of the elastic modulus with nonlinear distribution in a 2D elastic problem and the location and quantification of the loads applied to a 3D hyperelastic beam, in both cases using only the displacement field of each test as input data. The results show that the model not only recovers the physical parameters with high precision, but also provides confidence intervals consistent with the physics of the problem, as well as being able to locate the position of the applied load and estimate its value, giving a confidence interval for that experiment.
Variational Rank Reduction Autoencoders for Generative Thermal Design
Sep 10, 2025Generative thermal design for complex geometries is fundamental in many areas of engineering, yet it faces two main challenges: the high computational cost of high-fidelity simulations and the limitations of conventional generative models. Approaches such as autoencoders (AEs) and variational autoencoders (VAEs) often produce unstructured latent spaces with discontinuities, which restricts their capacity to explore designs and generate physically consistent solutions. To address these limitations, we propose a hybrid framework that combines Variational Rank-Reduction Autoencoders (VRRAEs) with Deep Operator Networks (DeepONets). The VRRAE introduces a truncated SVD within the latent space, leading to continuous, interpretable, and well-structured representations that mitigate posterior collapse and improve geometric reconstruction. The DeepONet then exploits this compact latent encoding in its branch network, together with spatial coordinates in the trunk network, to predict temperature gradients efficiently and accurately. This hybrid approach not only enhances the quality of generated geometries and the accuracy of gradient prediction, but also provides a substantial advantage in inference efficiency compared to traditional numerical solvers. Overall, the study underscores the importance of structured latent representations for operator learning and highlights the potential of combining generative models and operator networks in thermal design and broader engineering applications.
Thermodynamics-informed super-resolution of scarce temporal dynamics data
Feb 27, 2024



We present a method to increase the resolution of measurements of a physical system and subsequently predict its time evolution using thermodynamics-aware neural networks. Our method uses adversarial autoencoders, which reduce the dimensionality of the full order model to a set of latent variables that are enforced to match a prior, for example a normal distribution. Adversarial autoencoders are seen as generative models, and they can be trained to generate high-resolution samples from low-resoution inputs, meaning they can address the so-called super-resolution problem. Then, a second neural network is trained to learn the physical structure of the latent variables and predict their temporal evolution. This neural network is known as an structure-preserving neural network. It learns the metriplectic-structure of the system and applies a physical bias to ensure that the first and second principles of thermodynamics are fulfilled. The integrated trajectories are decoded to their original dimensionality, as well as to the higher dimensionality space produced by the adversarial autoencoder and they are compared to the ground truth solution. The method is tested with two examples of flow over a cylinder, where the fluid properties are varied between both examples.
A graph convolutional autoencoder approach to model order reduction for parametrized PDEs
May 15, 2023The present work proposes a framework for nonlinear model order reduction based on a Graph Convolutional Autoencoder (GCA-ROM). In the reduced order modeling (ROM) context, one is interested in obtaining real-time and many-query evaluations of parametric Partial Differential Equations (PDEs). Linear techniques such as Proper Orthogonal Decomposition (POD) and Greedy algorithms have been analyzed thoroughly, but they are more suitable when dealing with linear and affine models showing a fast decay of the Kolmogorov n-width. On one hand, the autoencoder architecture represents a nonlinear generalization of the POD compression procedure, allowing one to encode the main information in a latent set of variables while extracting their main features. On the other hand, Graph Neural Networks (GNNs) constitute a natural framework for studying PDE solutions defined on unstructured meshes. Here, we develop a non-intrusive and data-driven nonlinear reduction approach, exploiting GNNs to encode the reduced manifold and enable fast evaluations of parametrized PDEs. We show the capabilities of the methodology for several models: linear/nonlinear and scalar/vector problems with fast/slow decay in the physically and geometrically parametrized setting. The main properties of our approach consist of (i) high generalizability in the low-data regime even for complex regimes, (ii) physical compliance with general unstructured grids, and (iii) exploitation of pooling and un-pooling operations to learn from scattered data.
Physics-informed Reinforcement Learning for Perception and Reasoning about Fluids
Mar 11, 2022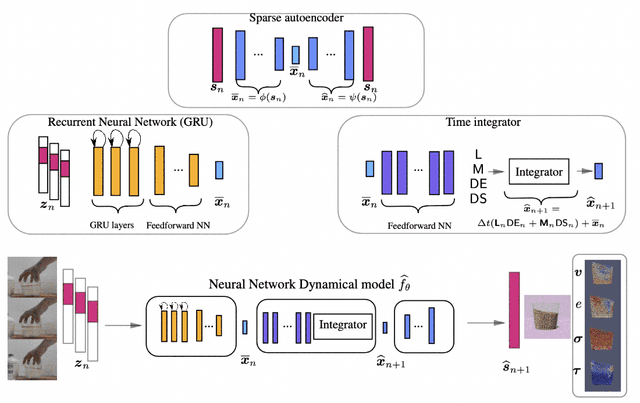
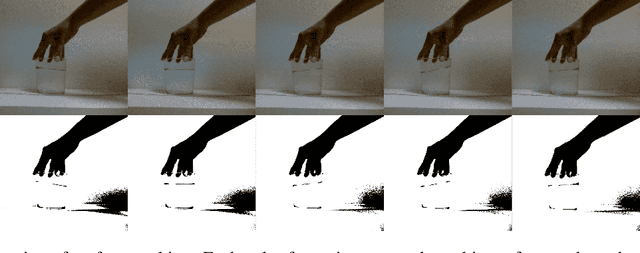
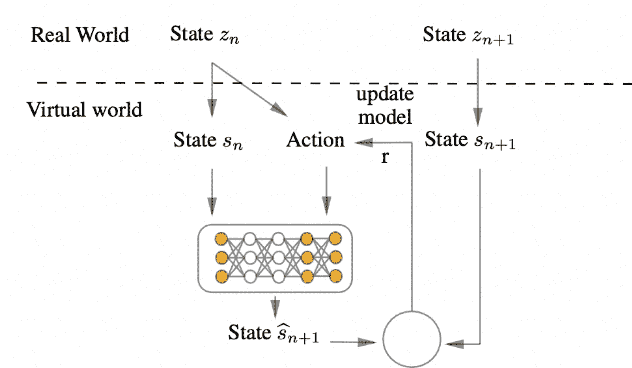
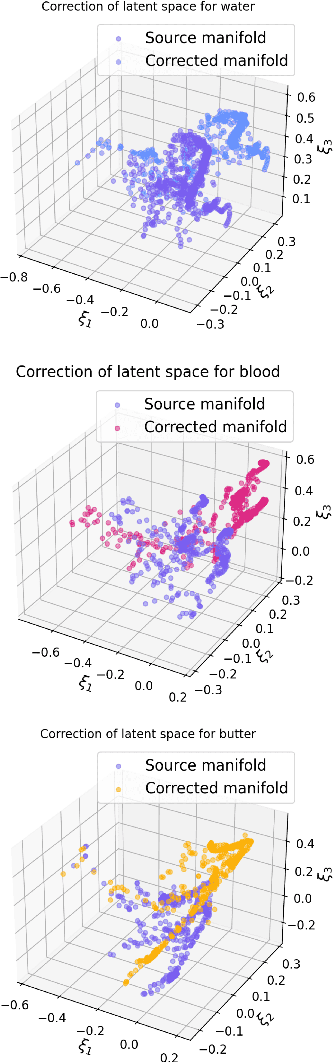
Learning and reasoning about physical phenomena is still a challenge in robotics development, and computational sciences play a capital role in the search for accurate methods able to provide explanations for past events and rigorous forecasts of future situations. We propose a physics-informed reinforcement learning strategy for fluid perception and reasoning from observations. As a model problem, we take the sloshing phenomena of different fluids contained in a glass. Starting from full-field and high-resolution synthetic data for a particular fluid, we develop a method for the tracking (perception) and analysis (reasoning) of any previously unseen liquid whose free surface is observed with a commodity camera. This approach demonstrates the importance of physics and knowledge not only in data-driven (grey box) modeling but also in the correction for real physics adaptation in low data regimes and partial observations of the dynamics. The method here presented is extensible to other domains such as the development of cognitive digital twins, able to learn from observation of phenomena for which they have not been trained explicitly.
Physics perception in sloshing scenes with guaranteed thermodynamic consistency
Jun 24, 2021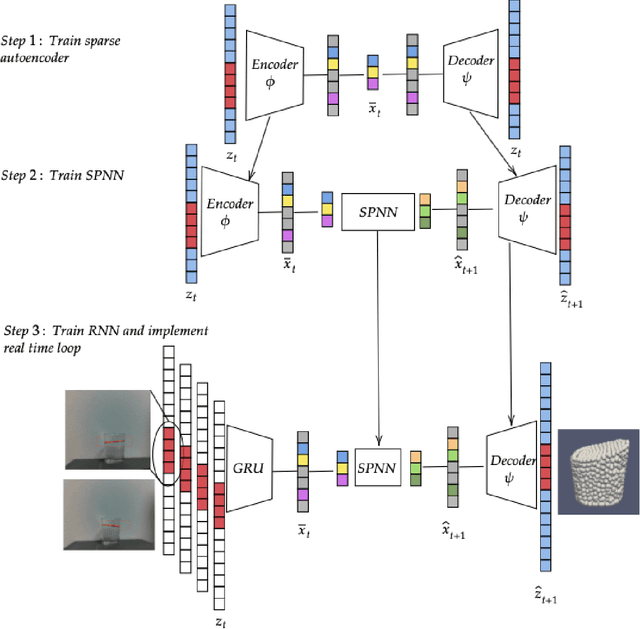

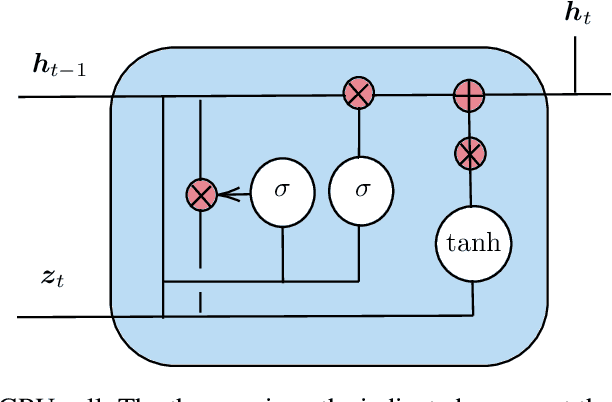
Physics perception very often faces the problem that only limited data or partial measurements on the scene are available. In this work, we propose a strategy to learn the full state of sloshing liquids from measurements of the free surface. Our approach is based on recurrent neural networks (RNN) that project the limited information available to a reduced-order manifold so as to not only reconstruct the unknown information, but also to be capable of performing fluid reasoning about future scenarios in real time. To obtain physically consistent predictions, we train deep neural networks on the reduced-order manifold that, through the employ of inductive biases, ensure the fulfillment of the principles of thermodynamics. RNNs learn from history the required hidden information to correlate the limited information with the latent space where the simulation occurs. Finally, a decoder returns data back to the high-dimensional manifold, so as to provide the user with insightful information in the form of augmented reality. This algorithm is connected to a computer vision system to test the performance of the proposed methodology with real information, resulting in a system capable of understanding and predicting future states of the observed fluid in real-time.