 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Visibility from Alternate Perspectives for Motion Planning with Occlusions
Apr 11, 2024



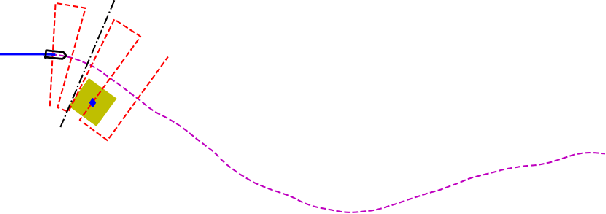
Visibility is a crucial aspect of planning and control of autonomous vehicles (AV), particularly when navigating environments with occlusions. However, when an AV follows a trajectory with multiple occlusions, existing methods evaluate each occlusion individually, calculate a visibility cost for each, and rely on the planner to minimize the overall cost. This can result in conflicting priorities for the planner, as individual occlusion costs may appear to be in opposition. We solve this problem by creating an alternate perspective cost map that allows for an aggregate view of the occlusions in the environment. The value of each cell on the cost map is a measure of the amount of visual information that the vehicle can gain about the environment by visiting that location. Our proposed method identifies observation locations and occlusion targets drawn from both map data and sensor data. We show how to estimate an alternate perspective for each observation location and then combine all estimates into a single alternate perspective cost map for motion planning.
Optimizing Task Waiting Times in Dynamic Vehicle Routing
Jul 08, 2023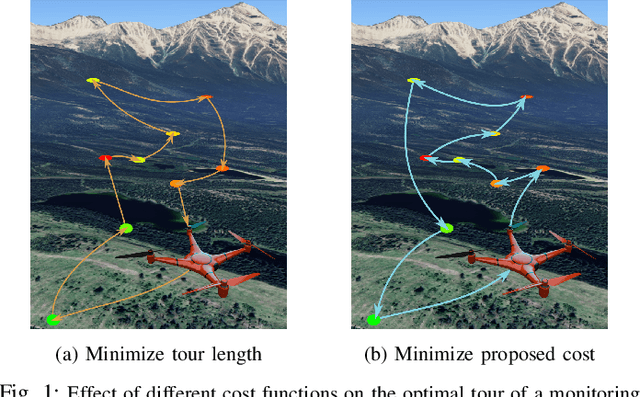

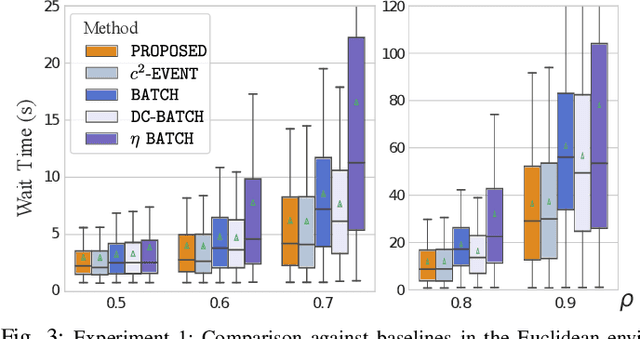
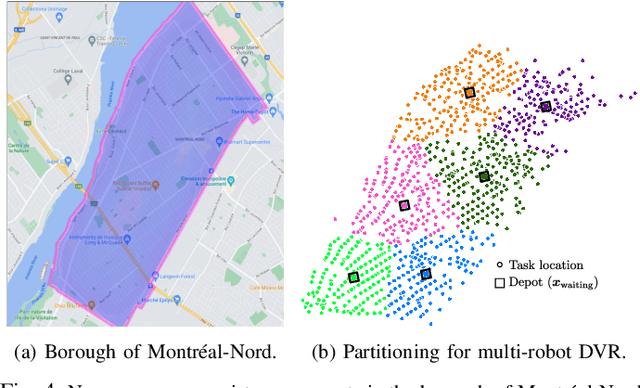
We study the problem of deploying a fleet of mobile robots to service tasks that arrive stochastically over time and at random locations in an environment. This is known as the Dynamic Vehicle Routing Problem (DVRP) and requires robots to allocate incoming tasks among themselves and find an optimal sequence for each robot. State-of-the-art approaches only consider average wait times and focus on high-load scenarios where the arrival rate of tasks approaches the limit of what can be handled by the robots while keeping the queue of unserviced tasks bounded, i.e., stable. To ensure stability, these approaches repeatedly compute minimum distance tours over a set of newly arrived tasks. This paper is aimed at addressing the missing policies for moderate-load scenarios, where quality of service can be improved by prioritizing long-waiting tasks. We introduce a novel DVRP policy based on a cost function that takes the $p$-norm over accumulated wait times and show it guarantees stability even in high-load scenarios. We demonstrate that the proposed policy outperforms the state-of-the-art in both mean and $95^{th}$ percentile wait times in moderate-load scenarios through simulation experiments in the Euclidean plane as well as using real-world data for city scale service requests.
Robotic Coverage for Continuous Mapping Ahead of a Moving Vehicle
Sep 07, 2019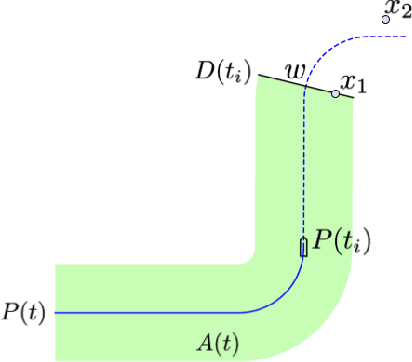
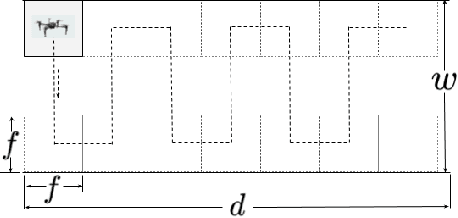
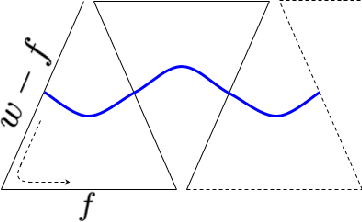
In this paper we investigate the problem of using a UAV to provide current map information of the environment in front of a moving ground vehicle. We propose a simple coverage plan called a conformal lawn mower plan that enables a UAV to scan the route ahead of the ground vehicle. The plan requires only limited knowledge of the ground vehicle's future path. For a class of curvature-constrained ground vehicle paths, we show that the proposed plan requires a UAV velocity that is no more than twice the velocity required to cover the optimal plan. We also establish necessary and sufficient UAV velocities, relative to the ground vehicle velocity, required to successfully cover any path in the curvature restricted set. In simulation, we validate the proposed plan, showing that the required velocity to provide coverage is strongly related to the curvature of the ground vehicle's path. Our results also illustrate the relationship between mapping requirements and the relative velocities of the UAV and ground vehicle.