 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Task Waiting Times in Dynamic Vehicle Routing
Paper and Code
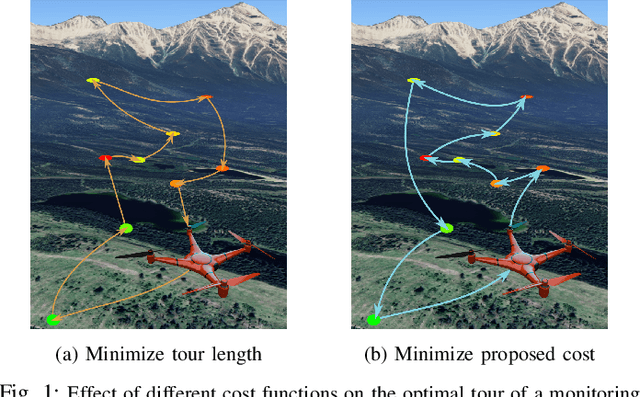

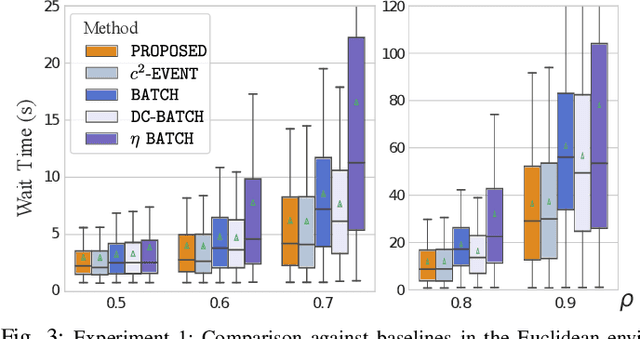
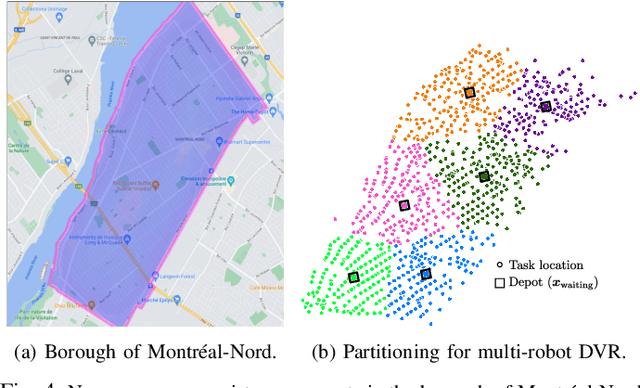
We study the problem of deploying a fleet of mobile robots to service tasks that arrive stochastically over time and at random locations in an environment. This is known as the Dynamic Vehicle Routing Problem (DVRP) and requires robots to allocate incoming tasks among themselves and find an optimal sequence for each robot. State-of-the-art approaches only consider average wait times and focus on high-load scenarios where the arrival rate of tasks approaches the limit of what can be handled by the robots while keeping the queue of unserviced tasks bounded, i.e., stable. To ensure stability, these approaches repeatedly compute minimum distance tours over a set of newly arrived tasks. This paper is aimed at addressing the missing policies for moderate-load scenarios, where quality of service can be improved by prioritizing long-waiting tasks. We introduce a novel DVRP policy based on a cost function that takes the $p$-norm over accumulated wait times and show it guarantees stability even in high-load scenarios. We demonstrate that the proposed policy outperforms the state-of-the-art in both mean and $95^{th}$ percentile wait times in moderate-load scenarios through simulation experiments in the Euclidean plane as well as using real-world data for city scale service requests.