 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScheMatiQ: From Research Question to Structured Data through Interactive Schema Discovery
Apr 10, 2026Many disciplines pose natural-language research questions over large document collections whose answers typically require structured evidence, traditionally obtained by manually designing an annotation schema and exhaustively labeling the corpus, a slow and error-prone process. We introduce ScheMatiQ, which leverages calls to a backbone LLM to take a question and a corpus to produce a schema and a grounded database, with a web interface that lets steer and revise the extraction. In collaboration with domain experts, we show that ScheMatiQ yields outputs that support real-world analysis in law and computational biology. We release ScheMatiQ as open source with a public web interface, and invite experts across disciplines to use it with their own data. All resources, including the website, source code, and demonstration video, are available at: www.ScheMatiQ-ai.com
Motion Planning via Manifold Samples
Jul 05, 2011

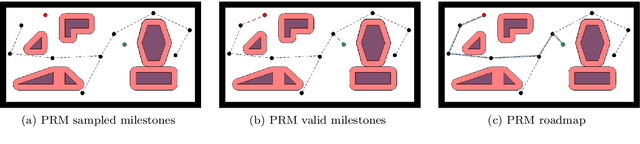
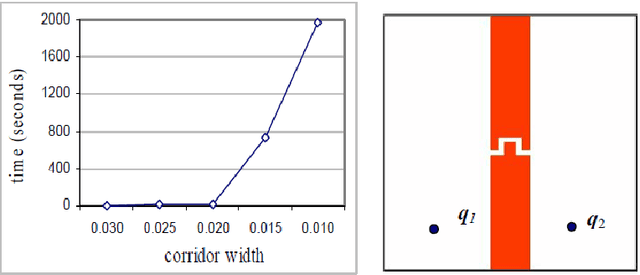
We present a general and modular algorithmic framework for path planning of robots. Our framework combines geometric methods for exact and complete analysis of low-dimensional configuration spaces, together with practical, considerably simpler sampling-based approaches that are appropriate for higher dimensions. In order to facilitate the transfer of advanced geometric algorithms into practical use, we suggest taking samples that are entire low-dimensional manifolds of the configuration space that capture the connectivity of the configuration space much better than isolated point samples. Geometric algorithms for analysis of low-dimensional manifolds then provide powerful primitive operations. The modular design of the framework enables independent optimization of each modular component. Indeed, we have developed, implemented and optimized a primitive operation for complete and exact combinatorial analysis of a certain set of manifolds, using arrangements of curves of rational functions and concepts of generic programming. This in turn enabled us to implement our framework for the concrete case of a polygonal robot translating and rotating amidst polygonal obstacles. We demonstrate that the integration of several carefully engineered components leads to significant speedup over the popular PRM sampling-based algorithm, which represents the more simplistic approach that is prevalent in practice. We foresee possible extensions of our framework to solving high-dimensional problems beyond motion planning.
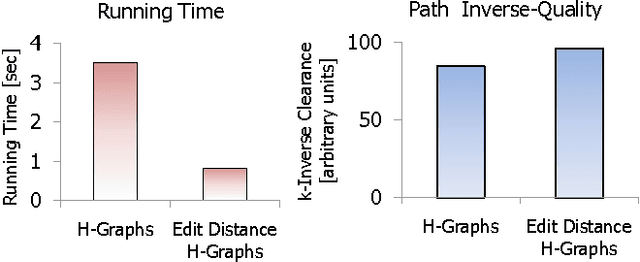
Improving the Quality of Non-Holonomic Motion by Hybridizing C-PRM Paths
Sep 24, 2010
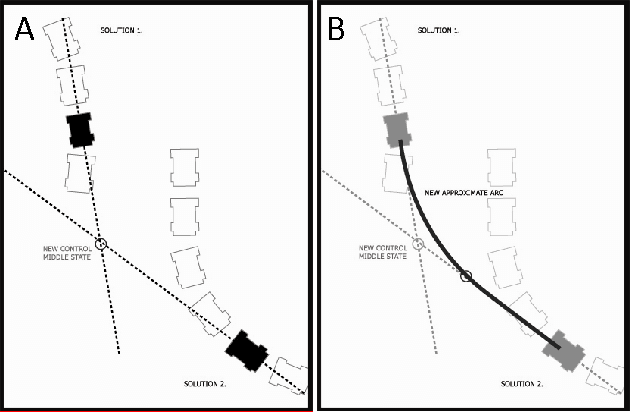
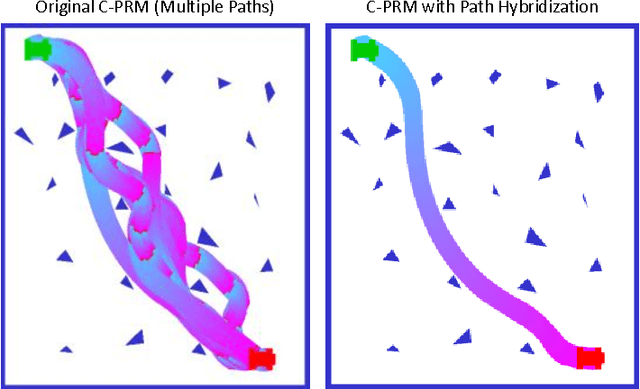
Sampling-based motion planners are an effective means for generating collision-free motion paths. However, the quality of these motion paths, with respect to different quality measures such as path length, clearance, smoothness or energy, is often notoriously low. This problem is accentuated in the case of non-holonomic sampling-based motion planning, in which the space of feasible motion trajectories is restricted. In this study, we combine the C-PRM algorithm by Song and Amato with our recently introduced path-hybridization approach, for creating high quality non-holonomic motion paths, with combinations of several different quality measures such as path length, smoothness or clearance, as well as the number of reverse car motions. Our implementation includes a variety of code optimizations that result in nearly real-time performance, and which we believe can be extended with further optimizations to a real-time tool for the planning of high-quality car-like motion.
A Little More, a Lot Better: Improving Path Quality by a Simple Path Merging Algorithm
Apr 04, 2010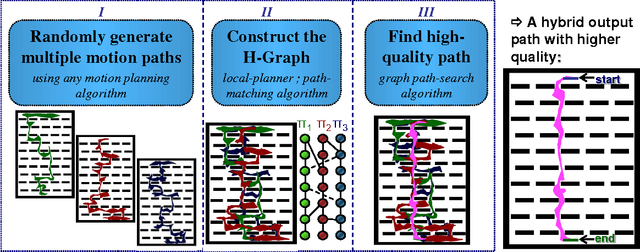
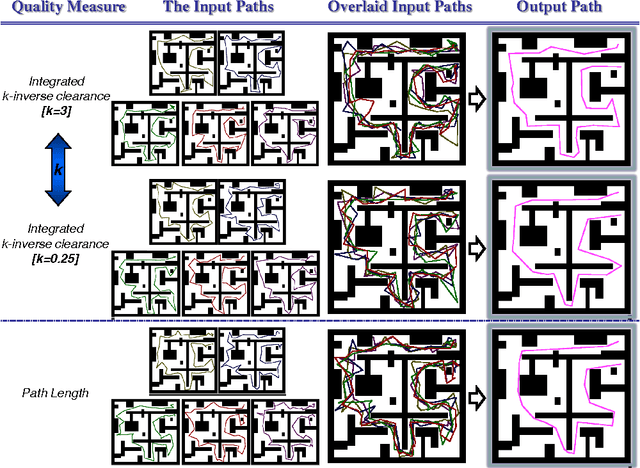
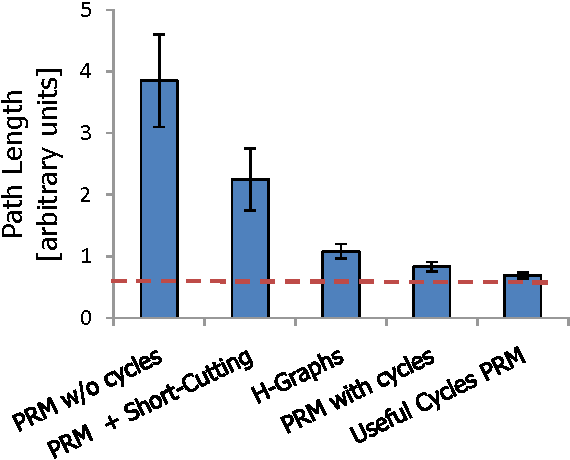
Sampling-based motion planners are an effective means for generating collision-free motion paths. However, the quality of these motion paths (with respect to quality measures such as path length, clearance, smoothness or energy) is often notoriously low, especially in high-dimensional configuration spaces. We introduce a simple algorithm for merging an arbitrary number of input motion paths into a hybrid output path of superior quality, for a broad and general formulation of path quality. Our approach is based on the observation that the quality of certain sub-paths within each solution may be higher than the quality of the entire path. A dynamic-programming algorithm, which we recently developed for comparing and clustering multiple motion paths, reduces the running time of the merging algorithm significantly. We tested our algorithm in motion-planning problems with up to 12 degrees of freedom. We show that our algorithm is able to merge a handful of input paths produced by several different motion planners to produce output paths of much higher quality.