 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving the Quality of Non-Holonomic Motion by Hybridizing C-PRM Paths
Paper and Code
Sep 24, 2010
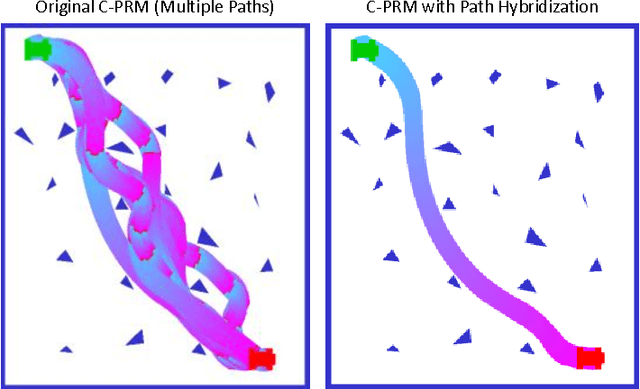
Sampling-based motion planners are an effective means for generating collision-free motion paths. However, the quality of these motion paths, with respect to different quality measures such as path length, clearance, smoothness or energy, is often notoriously low. This problem is accentuated in the case of non-holonomic sampling-based motion planning, in which the space of feasible motion trajectories is restricted. In this study, we combine the C-PRM algorithm by Song and Amato with our recently introduced path-hybridization approach, for creating high quality non-holonomic motion paths, with combinations of several different quality measures such as path length, smoothness or clearance, as well as the number of reverse car motions. Our implementation includes a variety of code optimizations that result in nearly real-time performance, and which we believe can be extended with further optimizations to a real-time tool for the planning of high-quality car-like motion.