 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Stability and Recovery for Neural Network Training
Jan 24, 2026Training modern neural networks is increasingly fragile, with rare but severe destabilizing updates often causing irreversible divergence or silent performance degradation. Existing optimization methods primarily rely on preventive mechanisms embedded within the optimizer, offering limited ability to detect and recover from instability once it occurs. We introduce a supervisory runtime stability framework that treats optimization as a controlled stochastic process. By isolating an innovation signal derived from secondary measurements, such as validation probes, the framework enables automatic detection and recovery from destabilizing updates without modifying the underlying optimizer. We provide theoretical runtime safety guarantees that formalize bounded degradation and recovery. Our implementation incurs minimal overhead and is compatible with memory-constrained training settings.
The Illusion of Consistency: Selection-Induced Bias in Gated Kalman Innovation Statistics
Dec 20, 2025Validation gating is a fundamental component of classical Kalman-based tracking systems. Only measurements whose normalized innovation squared (NIS) falls below a prescribed threshold are considered for state update. While this procedure is statistically motivated by the chi-square distribution, it implicitly replaces the unconditional innovation process with a conditionally observed one, restricted to the validation event. This paper shows that innovation statistics computed after gating converge to gate-conditioned rather than nominal quantities. Under classical linear--Gaussian assumptions, we derive exact expressions for the first- and second-order moments of the innovation conditioned on ellipsoidal gating, and show that gating induces a deterministic, dimension-dependent contraction of the innovation covariance. The analysis is extended to NN association, which is shown to act as an additional statistical selection operator. We prove that selecting the minimum-norm innovation among multiple in-gate measurements introduces an unavoidable energy contraction, implying that nominal innovation statistics cannot be preserved under nontrivial gating and association. Closed-form results in the two-dimensional case quantify the combined effects and illustrate their practical significance.
Improving Requirements Classification with SMOTE-Tomek Preprocessing
Jan 11, 2025This study emphasizes the domain of requirements engineering by applying the SMOTE-Tomek preprocessing technique, combined with stratified K-fold cross-validation, to address class imbalance in the PROMISE dataset. This dataset comprises 969 categorized requirements, classified into functional and non-functional types. The proposed approach enhances the representation of minority classes while maintaining the integrity of validation folds, leading to a notable improvement in classification accuracy. Logistic regression achieved 76.16\%, significantly surpassing the baseline of 58.31\%. These results highlight the applicability and efficiency of machine learning models as scalable and interpretable solutions.
CarSpeedNet: A Deep Neural Network-based Car Speed Estimation from Smartphone Accelerometer
Jan 15, 2024In this study, a novel deep neural network (DNN) architecture, CarSpeedNet, is introduced to estimate car speed using three-axis accelerometer data from smartphones. Utilizing 13 hours of data collected from smartphones mounted in vehicles navigating through various regions in Israel, the CarSpeedNet effectively learns the relationship between measured smartphone acceleration and car speed. Ground truth speed data was obtained at 1[Hz] from the GPS receiver in the smartphones. The proposed model enables high-frequency speed estimation, incorporating historical inputs. Our trained model demonstrates exceptional accuracy in car speed estimation, achieving a precision of less than 0.72[m/s] during an extended driving test, solely relying on smartphone accelerometer data without any connectivity to the car.
Learning Position From Vehicle Vibration Using an Inertial Measurement Unit
Mar 06, 2023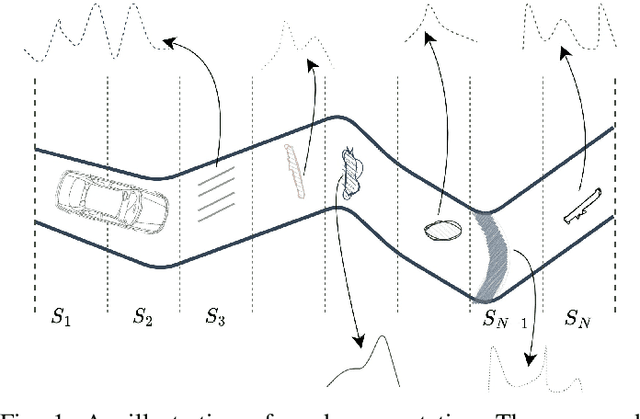
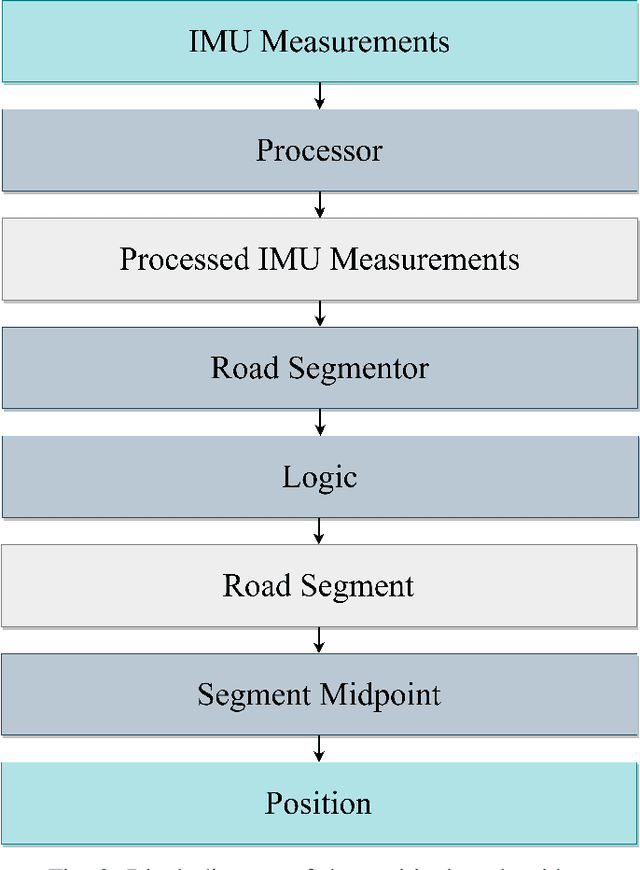
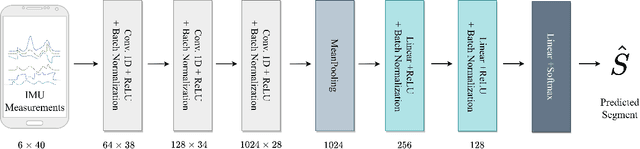
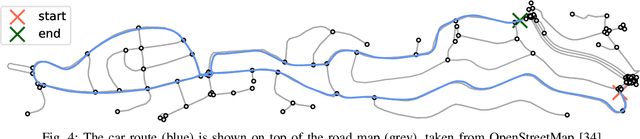
This paper presents a novel approach to vehicle positioning that operates without reliance on the global navigation satellite system (GNSS). Traditional GNSS approaches are vulnerable to interference in certain environments, rendering them unreliable in situations such as urban canyons, under flyovers, or in low reception areas. This study proposes a vehicle positioning method based on learning the road signature from accelerometer and gyroscope measurements obtained by an inertial measurement unit (IMU) sensor. In our approach, the route is divided into segments, each with a distinct signature that the IMU can detect through the vibrations of a vehicle in response to subtle changes in the road surface. The study presents two different data-driven methods for learning the road segment from IMU measurements. One method is based on convolutional neural networks and the other on ensemble random forest applied to handcrafted features. Additionally, the authors present an algorithm to deduce the position of a vehicle in real-time using the learned road segment. The approach was applied in two positioning tasks: (i) a car along a 6[km] route in a dense urban area; (ii) an e-scooter on a 1[km] route that combined road and pavement surfaces. The mean error between the proposed method's position and the ground truth was approximately 50[m] for the car and 30[m] for the e-scooter. Compared to a solution based on time integration of the IMU measurements, the proposed approach has a mean error of more than 5 times better for e-scooters and 20 times better for cars.
ProNet: Adaptive Process Noise Estimation for INS/DVL Fusion
Dec 17, 2022



Inertial and Doppler velocity log sensors are commonly used to provide the navigation solution for autonomous underwater vehicles (AUV). To this end, a nonlinear filter is adopted for the fusion task. The filter's process noise covariance matrix is critical for filter accuracy and robustness. While this matrix varies over time during the AUV mission, the filter assumes a constant matrix. Several models and learning approaches in the literature suggest tuning the process noise covariance during operation. In this work, we propose ProNet, a hybrid, adaptive process, noise estimation approach for a velocity-aided navigation filter. ProNet requires only the inertial sensor reading to regress the process noise covariance. Once learned, it is fed into the model-based navigation filter, resulting in a hybrid filter. Simulation results show the benefits of our approach compared to other models and learning adaptive approaches.
MountNet: Learning an Inertial Sensor Mounting Angle with Deep Neural Networks
Dec 10, 2022



Finding the mounting angle of a smartphone inside a car is crucial for navigation, motion detection, activity recognition, and other applications. It is a challenging task in several aspects: (i) the mounting angle at the drive start is unknown and may differ significantly between users; (ii) the user, or bad fixture, may change the mounting angle while driving; (iii) a rapid and computationally efficient real-time solution is required for most applications. To tackle these problems, a data-driven approach using deep neural networks (DNNs) is presented to learn the yaw mounting angle of a smartphone equipped with an inertial measurement unit (IMU) and strapped to a car. The proposed model, MountNet, uses only IMU readings as input and, in contrast to existing solutions, does not require inputs from global navigation satellite systems (GNSS). IMU data is collected for training and validation with the sensor mounted at a known yaw mounting angle and a range of ground truth labels is generated by applying a prescribed rotation to the measurements. Although the training data did not include recordings with real sensor rotations, tests on data with real and synthetic rotations show similar results. An algorithm is formulated for real-time deployment to detect and smooth transitions in device mounting angle estimated by MountNet. MountNet is shown to find the mounting angle rapidly which is critical in real-time applications. Our method converges in less than 30 seconds of driving to a mean error of 4 degrees allowing a fast calibration phase for other algorithms and applications. When the device is rotated in the middle of a drive, large changes converge in 5 seconds and small changes converge in less than 30 seconds.
Adaptive Step Size Learning with Applications to Velocity Aided Inertial Navigation System
Jun 27, 2022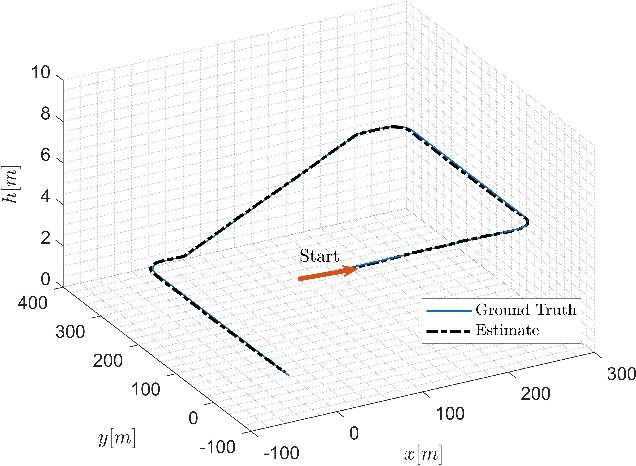

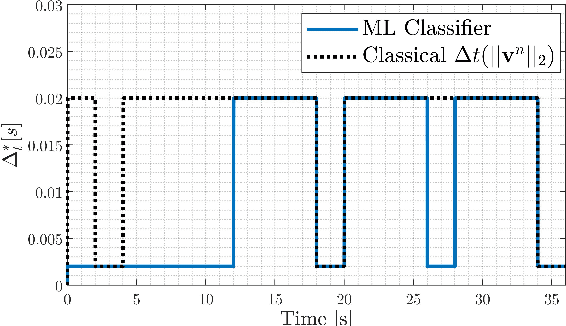
Autonomous underwater vehicles (AUV) are commonly used in many underwater applications. Recently, the usage of multi-rotor unmanned autonomous vehicles (UAV) for marine applications is receiving more attention in the literature. Usually, both platforms employ an inertial navigation system (INS), and aiding sensors for an accurate navigation solution. In AUV navigation, Doppler velocity log (DVL) is mainly used to aid the INS, while for UAVs, it is common to use global navigation satellite systems (GNSS) receivers. The fusion between the aiding sensor and the INS requires a definition of step size parameter in the estimation process. It is responsible for the solution frequency update and, eventually, its accuracy. The choice of the step size poses a tradeoff between computational load and navigation performance. Generally, the aiding sensors update frequency is considered much slower compared to the INS operating frequency (hundreds Hertz). Such high rate is unnecessary for most platforms, specifically for low dynamics AUVs. In this work, a supervised machine learning based adaptive tuning scheme to select the proper INS step size is proposed. To that end, a velocity error bound is defined, allowing the INS/DVL or the INS/GNSS to act in a sub-optimal working conditions, and yet minimize the computational load. Results from simulations and field experiment show the benefits of using the proposed approach. In addition, the proposed framework can be applied to any other fusion scenarios between any type of sensors or platforms.
Learning Vehicle Trajectory Uncertainty
Jun 09, 2022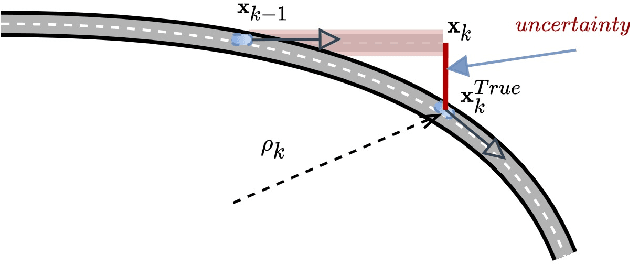
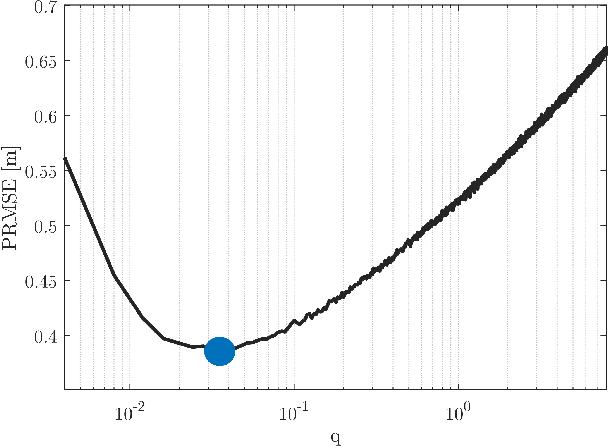
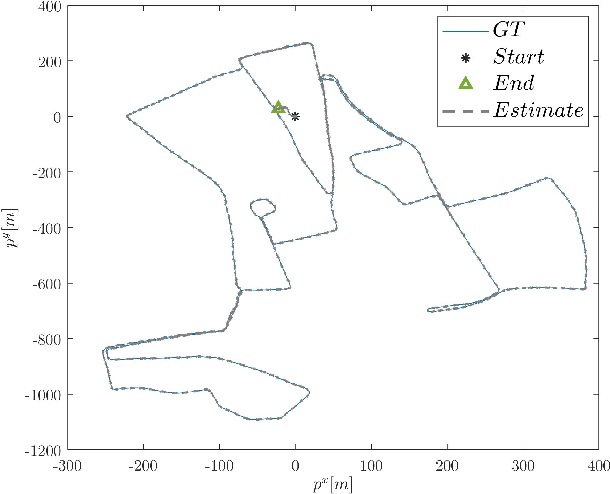
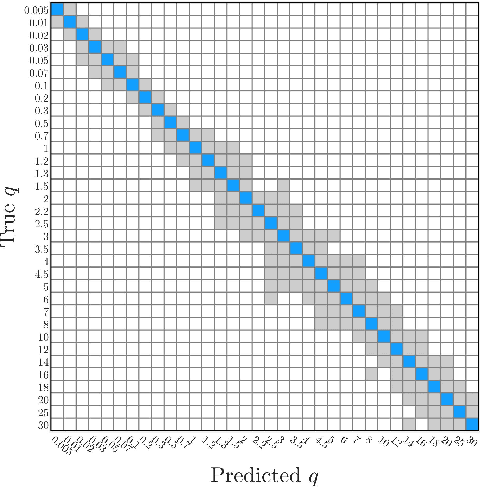
The linear Kalman filter is commonly used for vehicle tracking. This filter requires knowledge of the vehicle trajectory and the statistics of the system and measurement models. In real-life scenarios, prior assumptions made while determining those models do not hold. As a consequence, the overall filter performance degrades and in some situations the estimated states diverge. To overcome the uncertainty in the {vehicle kinematic} trajectory modeling, additional artificial process noise may be added to the model or different types of adaptive filters may be employed. This paper proposes {a hybrid} adaptive Kalman filter based on {model and} machine learning algorithms. First, recurrent neural networks are employed to learn the vehicle's geometrical and kinematic features. In turn, those features are plugged into a supervised learning model, thereby providing the actual process noise covariance to be used in the Kalman framework. The proposed approach is evaluated and compared to six other adaptive filters using the Oxford RobotCar dataset. The proposed framework can be implemented in other estimation problems to accurately determine the process noise covariance in real-time scenarios.
Learning Car Speed Using Inertial Sensors
May 15, 2022
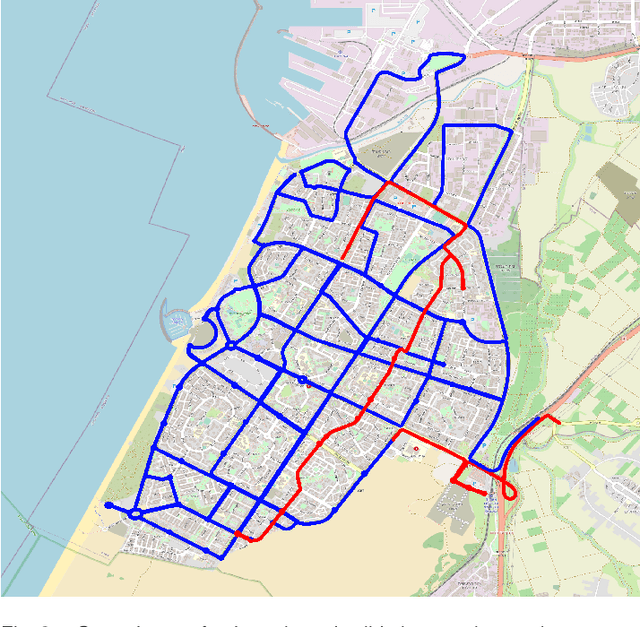
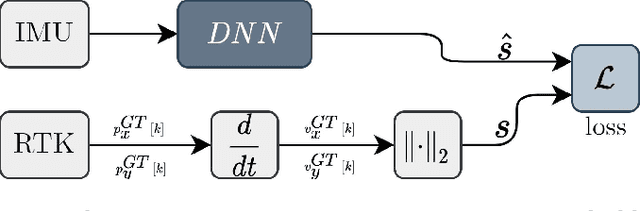
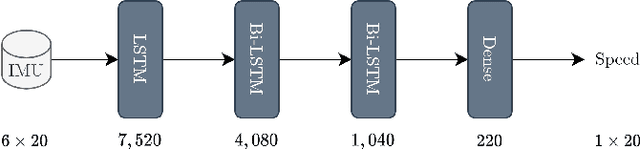
A deep neural network (DNN) is trained to estimate the speed of a car driving in an urban area using as input a stream of measurements from a low-cost six-axis inertial measurement unit (IMU). Three hours of data was collected by driving through the city of Ashdod, Israel in a car equipped with a global navigation satellite system (GNSS) real time kinematic (RTK) positioning device and a synchronized IMU. Ground truth labels for the car speed were calculated using the position measurements obtained at the high rate of 50 [Hz]. A DNN architecture with long short-term memory layers is proposed to enable high-frequency speed estimation that accounts for previous inputs history and the nonlinear relation between speed, acceleration, and angular velocity. A simplified aided dead reckoning localization scheme is formulated to assess the trained model which provides the speed pseudo-measurement. The trained model is shown to substantially improve the position accuracy during a 4 minutes drive without the use of GNSS position updates.