 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End UAV Simulation for Visual SLAM and Navigation
Dec 01, 2020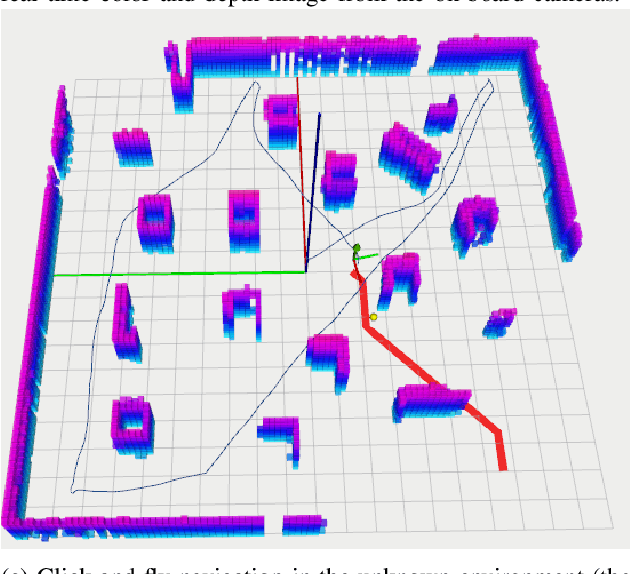
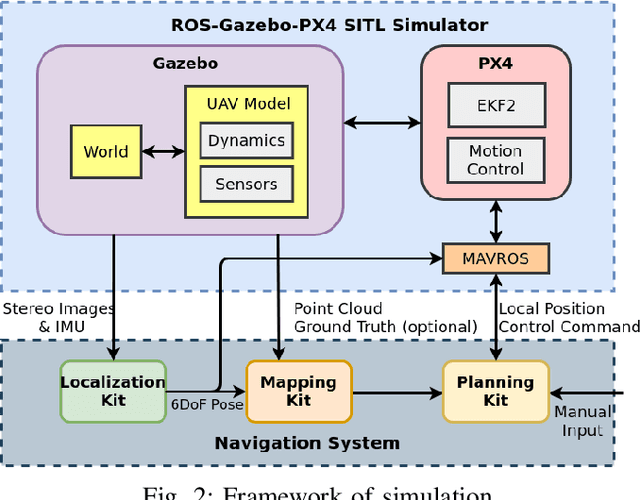
Visual Simultaneous Localization and Mapping (v-SLAM) and navigation of multirotor Unmanned Aerial Vehicles (UAV) in an unknown environment have grown in popularity for both research and education. However, due to the complex hardware setup, safety precautions, and battery constraints, extensive physical testing can be expensive and time-consuming. As an alternative solution, simulation tools lower the barrier to carry out the algorithm testing and validation before field trials. In this letter, we customize the ROS-Gazebo-PX4 simulator in deep and provide an end-to-end simulation solution for the UAV v-SLAM and navigation study. A set of localization, mapping, and path planning kits were also integrated into the simulation platform. In our simulation, various aspects, including complex environments and onboard sensors, can simultaneously interact with our navigation framework to achieve specific surveillance missions. In this end-to-end simulation, we achieved click and fly level autonomy UAV navigation. The source code is open to the research community.
Rank-frequency relation for Chinese characters
Jan 26, 2014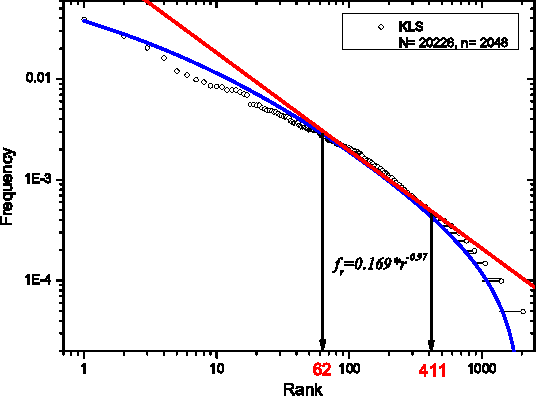
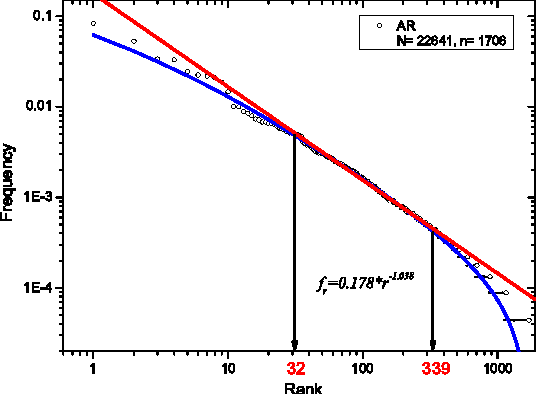
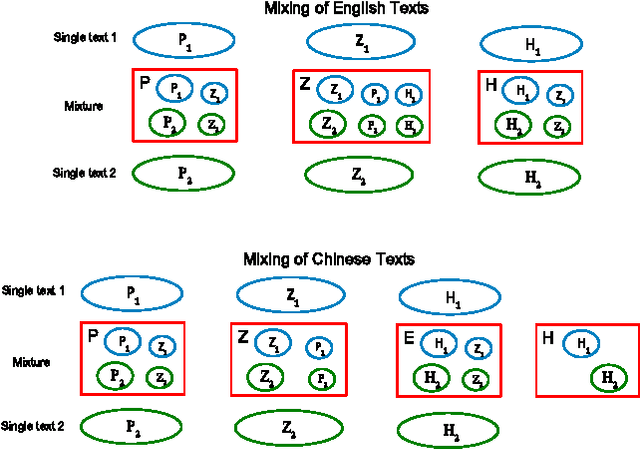
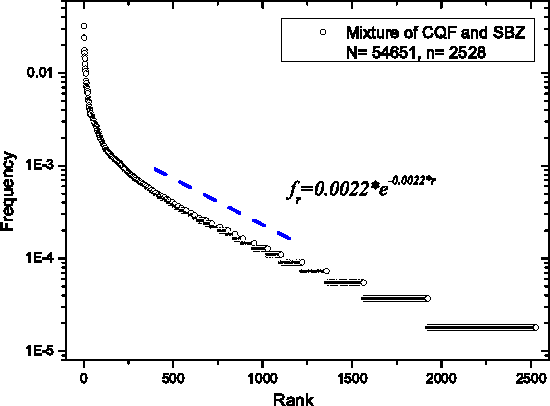
We show that the Zipf's law for Chinese characters perfectly holds for sufficiently short texts (few thousand different characters). The scenario of its validity is similar to the Zipf's law for words in short English texts. For long Chinese texts (or for mixtures of short Chinese texts), rank-frequency relations for Chinese characters display a two-layer, hierarchic structure that combines a Zipfian power-law regime for frequent characters (first layer) with an exponential-like regime for less frequent characters (second layer). For these two layers we provide different (though related) theoretical descriptions that include the range of low-frequency characters (hapax legomena). The comparative analysis of rank-frequency relations for Chinese characters versus English words illustrates the extent to which the characters play for Chinese writers the same role as the words for those writing within alphabetical systems.
* To appear in European Physical Journal B (EPJ B), 2014 (22 pages, 7 figures)