 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting Causality in the Frequency Domain with Cross-Mapping Coherence
Jul 30, 2024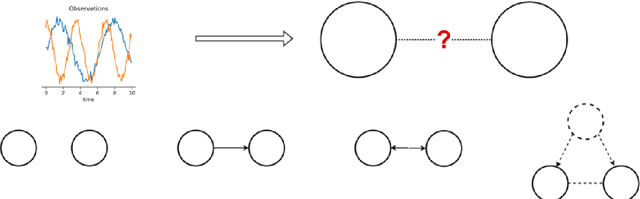
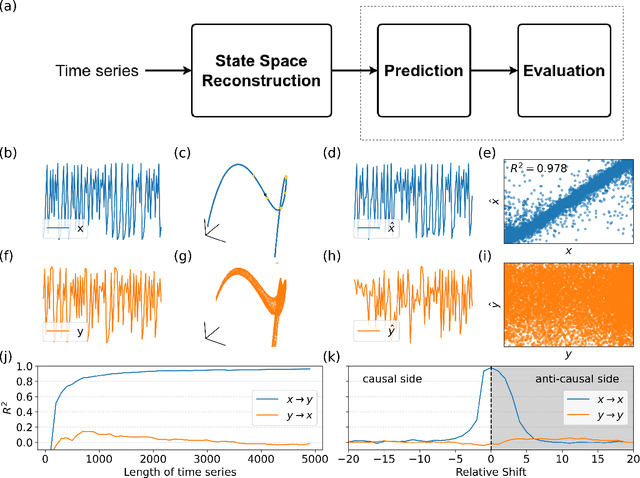

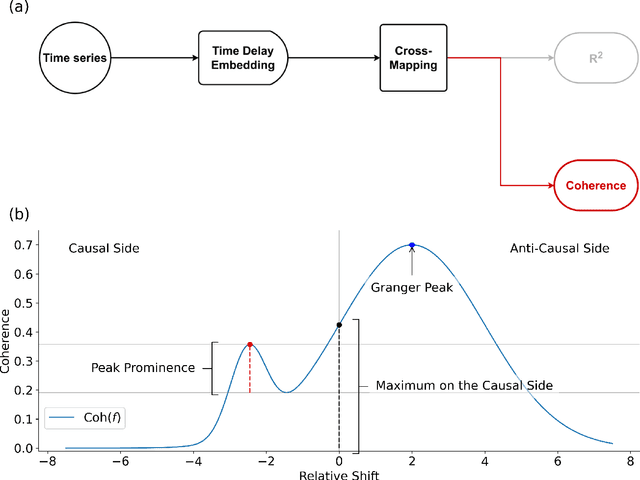
Understanding causal relationships within a system is crucial for uncovering its underlying mechanisms. Causal discovery methods, which facilitate the construction of such models from time-series data, hold the potential to significantly advance scientific and engineering fields. This study introduces the Cross-Mapping Coherence (CMC) method, designed to reveal causal connections in the frequency domain between time series. CMC builds upon nonlinear state-space reconstruction and extends the Convergent Cross-Mapping algorithm to the frequency domain by utilizing coherence metrics for evaluation. We tested the Cross-Mapping Coherence method using simulations of logistic maps, Lorenz systems, Kuramoto oscillators, and the Wilson-Cowan model of the visual cortex. CMC accurately identified the direction of causal connections in all simulated scenarios. When applied to the Wilson-Cowan model, CMC yielded consistent results similar to spectral Granger causality. Furthermore, CMC exhibits high sensitivity in detecting weak connections, demonstrates sample efficiency, and maintains robustness in the presence of noise. In conclusion, the capability to determine directed causal influences across different frequency bands allows CMC to provide valuable insights into the dynamics of complex, nonlinear systems.
aiMotive Dataset: A Multimodal Dataset for Robust Autonomous Driving with Long-Range Perception
Nov 17, 2022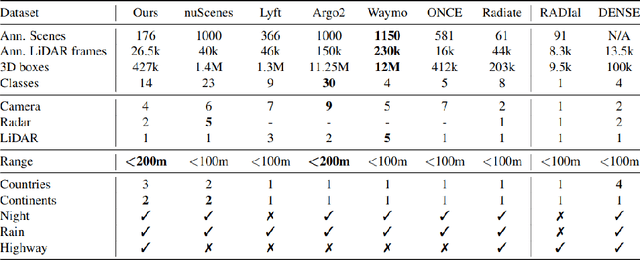
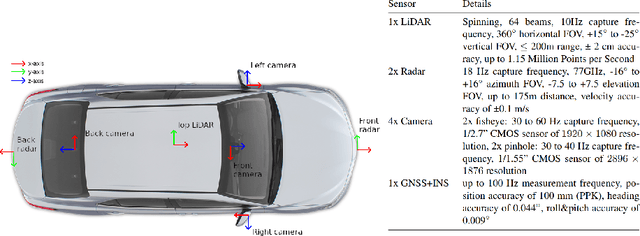
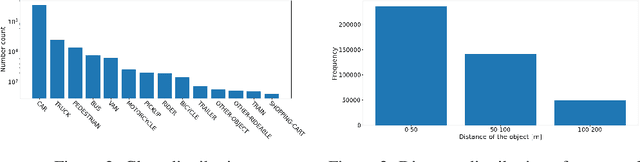

Autonomous driving is a popular research area within the computer vision research community. Since autonomous vehicles are highly safety-critical, ensuring robustness is essential for real-world deployment. While several public multimodal datasets are accessible, they mainly comprise two sensor modalities (camera, LiDAR) which are not well suited for adverse weather. In addition, they lack far-range annotations, making it harder to train neural networks that are the base of a highway assistant function of an autonomous vehicle. Therefore, we introduce a multimodal dataset for robust autonomous driving with long-range perception. The dataset consists of 176 scenes with synchronized and calibrated LiDAR, camera, and radar sensors covering a 360-degree field of view. The collected data was captured in highway, urban, and suburban areas during daytime, night, and rain and is annotated with 3D bounding boxes with consistent identifiers across frames. Furthermore, we trained unimodal and multimodal baseline models for 3D object detection. Data are available at \url{https://github.com/aimotive/aimotive_dataset}.