 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCCMR: High Resolution Optical Flow Estimation via Coarse-to-Fine Context-Guided Motion Reasoning
Nov 05, 2023


Attention-based motion aggregation concepts have recently shown their usefulness in optical flow estimation, in particular when it comes to handling occluded regions. However, due to their complexity, such concepts have been mainly restricted to coarse-resolution single-scale approaches that fail to provide the detailed outcome of high-resolution multi-scale networks. In this paper, we hence propose CCMR: a high-resolution coarse-to-fine approach that leverages attention-based motion grouping concepts to multi-scale optical flow estimation. CCMR relies on a hierarchical two-step attention-based context-motion grouping strategy that first computes global multi-scale context features and then uses them to guide the actual motion grouping. As we iterate both steps over all coarse-to-fine scales, we adapt cross covariance image transformers to allow for an efficient realization while maintaining scale-dependent properties. Experiments and ablations demonstrate that our efforts of combining multi-scale and attention-based concepts pay off. By providing highly detailed flow fields with strong improvements in both occluded and non-occluded regions, our CCMR approach not only outperforms both the corresponding single-scale attention-based and multi-scale attention-free baselines by up to 23.0% and 21.6%, respectively, it also achieves state-of-the-art results, ranking first on KITTI 2015 and second on MPI Sintel Clean and Final. Code and trained models are available at https://github.com/cv-stuttgart /CCMR.
Spring: A High-Resolution High-Detail Dataset and Benchmark for Scene Flow, Optical Flow and Stereo
Mar 03, 2023



While recent methods for motion and stereo estimation recover an unprecedented amount of details, such highly detailed structures are neither adequately reflected in the data of existing benchmarks nor their evaluation methodology. Hence, we introduce Spring $-$ a large, high-resolution, high-detail, computer-generated benchmark for scene flow, optical flow, and stereo. Based on rendered scenes from the open-source Blender movie "Spring", it provides photo-realistic HD datasets with state-of-the-art visual effects and ground truth training data. Furthermore, we provide a website to upload, analyze and compare results. Using a novel evaluation methodology based on a super-resolved UHD ground truth, our Spring benchmark can assess the quality of fine structures and provides further detailed performance statistics on different image regions. Regarding the number of ground truth frames, Spring is 60$\times$ larger than the only scene flow benchmark, KITTI 2015, and 15$\times$ larger than the well-established MPI Sintel optical flow benchmark. Initial results for recent methods on our benchmark show that estimating fine details is indeed challenging, as their accuracy leaves significant room for improvement. The Spring benchmark and the corresponding datasets are available at http://spring-benchmark.org.
High Resolution Multi-Scale RAFT (Robust Vision Challenge 2022)
Oct 30, 2022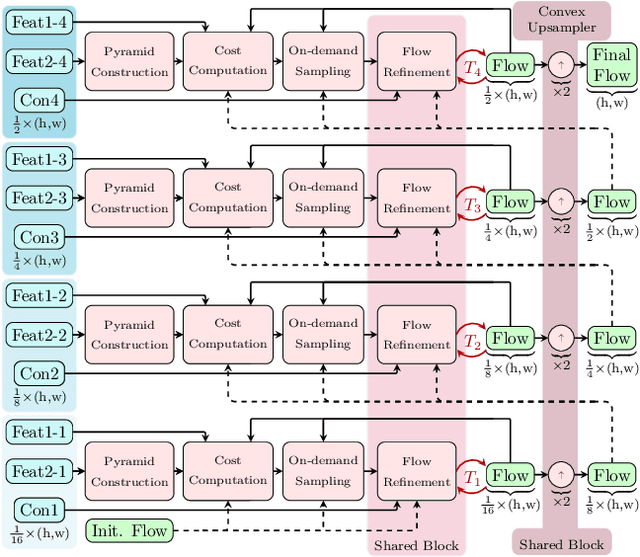
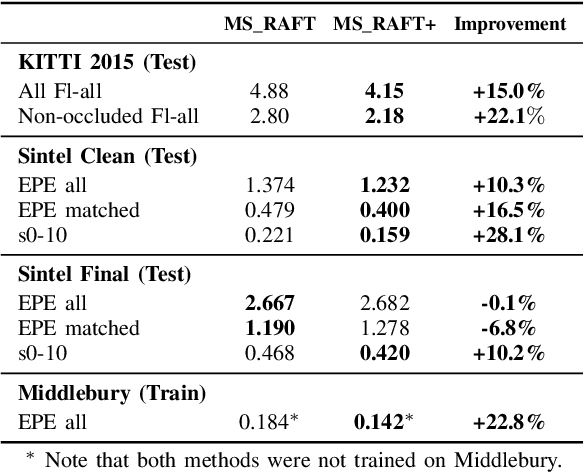
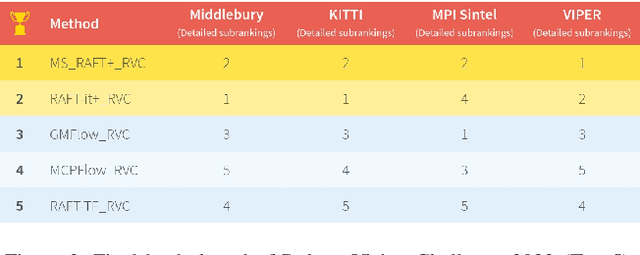
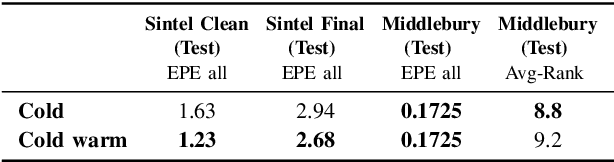
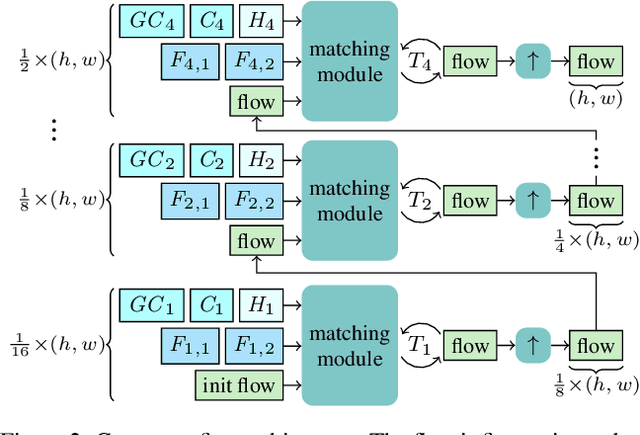
In this report, we present our optical flow approach, MS-RAFT+, that won the Robust Vision Challenge 2022. It is based on the MS-RAFT method, which successfully integrates several multi-scale concepts into single-scale RAFT. Our approach extends this method by exploiting an additional finer scale for estimating the flow, which is made feasible by on-demand cost computation. This way, it can not only operate at half the original resolution, but also use MS-RAFT's shared convex upsampler to obtain full resolution flow. Moreover, our approach relies on an adjusted fine-tuning scheme during training. This in turn aims at improving the generalization across benchmarks. Among all participating methods in the Robust Vision Challenge, our approach ranks first on VIPER and second on KITTI, Sintel, and Middlebury, resulting in the first place of the overall ranking.
Multi-Scale RAFT: Combining Hierarchical Concepts for Learning-based Optical FLow Estimation
Jul 25, 2022
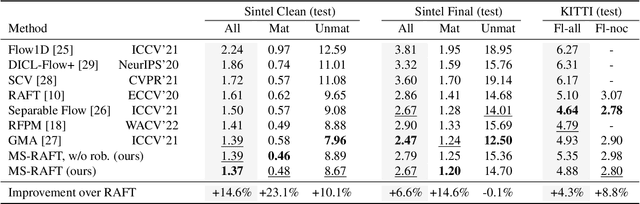
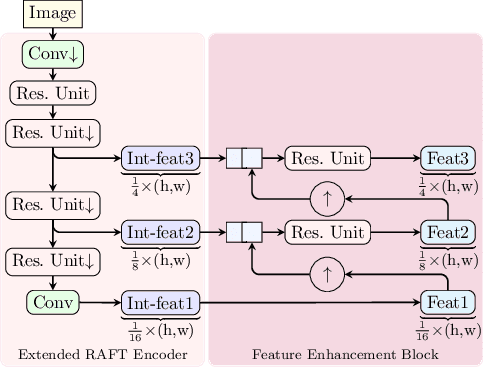
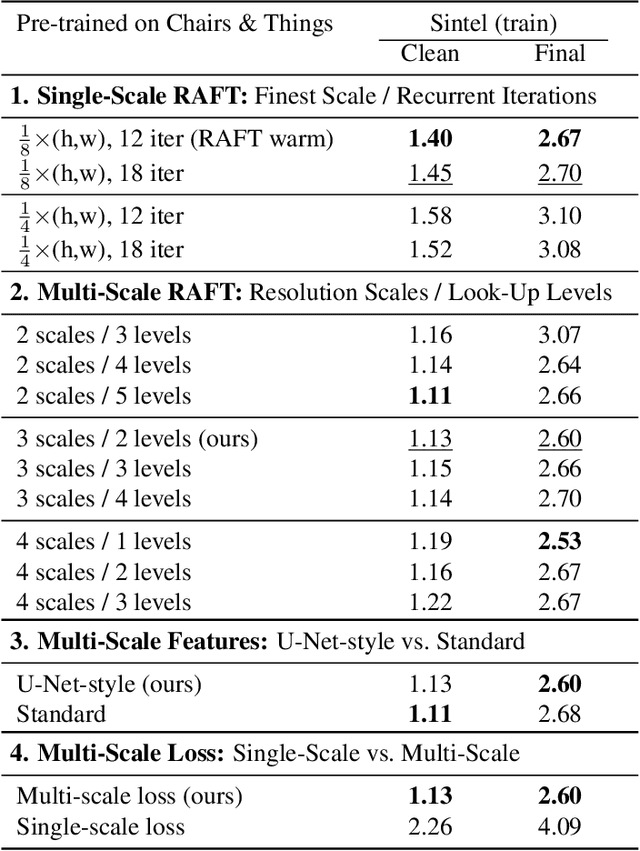
Many classical and learning-based optical flow methods rely on hierarchical concepts to improve both accuracy and robustness. However, one of the currently most successful approaches -- RAFT -- hardly exploits such concepts. In this work, we show that multi-scale ideas are still valuable. More precisely, using RAFT as a baseline, we propose a novel multi-scale neural network that combines several hierarchical concepts within a single estimation framework. These concepts include (i) a partially shared coarse-to-fine architecture, (ii) multi-scale features, (iii) a hierarchical cost volume and (iv) a multi-scale multi-iteration loss. Experiments on MPI Sintel and KITTI clearly demonstrate the benefits of our approach. They show not only substantial improvements compared to RAFT, but also state-of-the-art results -- in particular in non-occluded regions. Code will be available at https://github.com/cv-stuttgart/MS_RAFT.
M-FUSE: Multi-frame Fusion for Scene Flow Estimation
Jul 12, 2022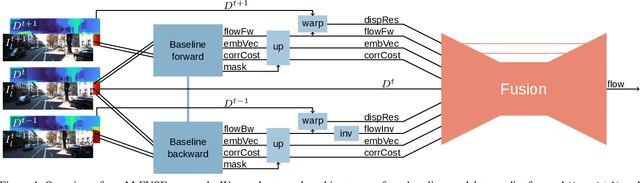
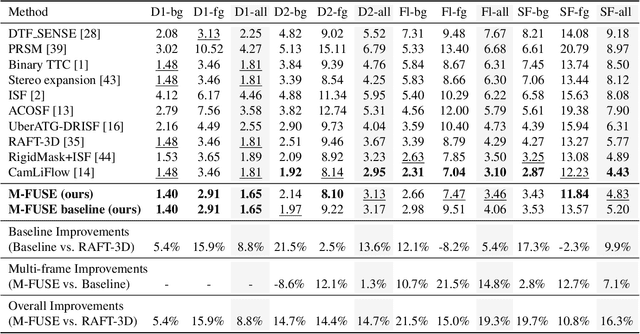

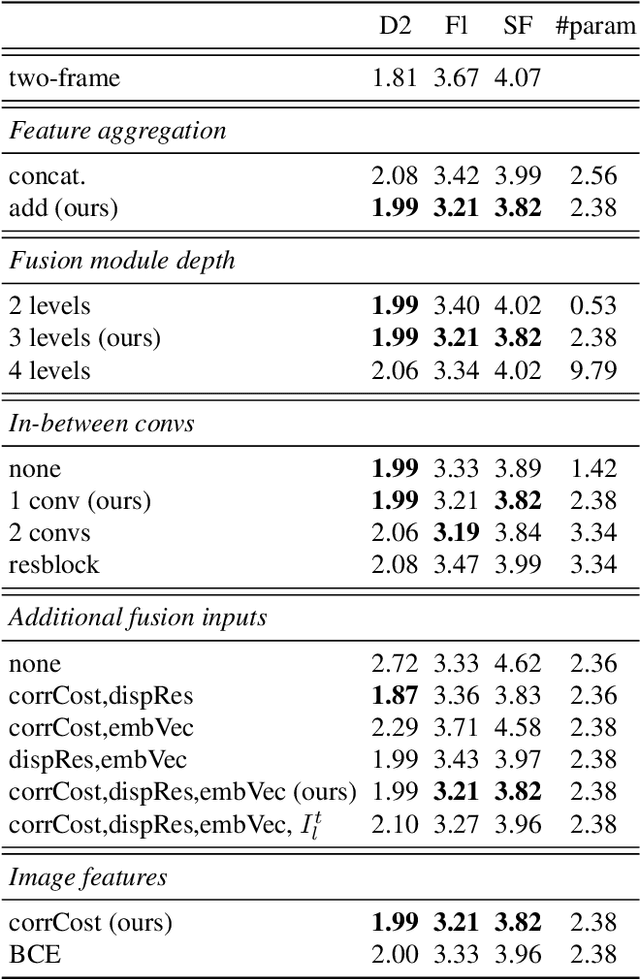
Recently, neural network for scene flow estimation show impressive results on automotive data such as the KITTI benchmark. However, despite of using sophisticated rigidity assumptions and parametrizations, such networks are typically limited to only two frame pairs which does not allow them to exploit temporal information. In our paper we address this shortcoming by proposing a novel multi-frame approach that considers an additional preceding stereo pair. To this end, we proceed in two steps: Firstly, building upon the recent RAFT-3D approach, we develop an advanced two-frame baseline by incorporating an improved stereo method. Secondly, and even more importantly, exploiting the specific modeling concepts of RAFT-3D, we propose a U-Net like architecture that performs a fusion of forward and backward flow estimates and hence allows to integrate temporal information on demand. Experiments on the KITTI benchmark do not only show that the advantages of the improved baseline and the temporal fusion approach complement each other, they also demonstrate that the computed scene flow is highly accurate. More precisely, our approach ranks second overall and first for the even more challenging foreground objects, in total outperforming the original RAFT-3D method by more than 16%. Code is available at https://github.com/cv-stuttgart/M-FUSE.