 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuroflight: Next Generation Flight Control Firmware
Jan 19, 2019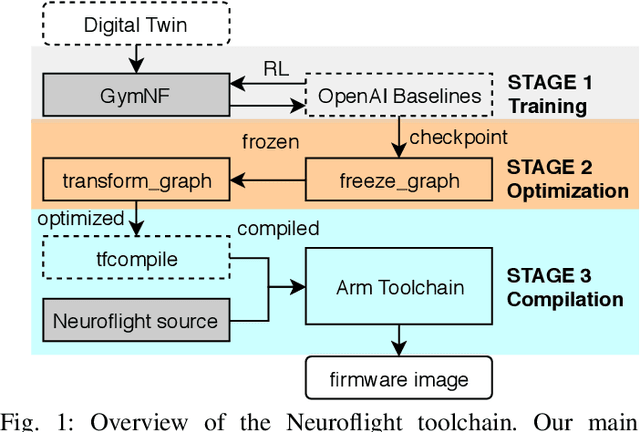
Little innovation has been made to low-level attitude flight control used by unmanned aerial vehicles, which still predominantly uses the classical PID controller. In this work we introduce Neuroflight, the first open source neuro-flight controller firmware. We present our toolchain for training a neural network in simulation and compiling it to run on embedded hardware. Challenges faced jumping from simulation to reality are discussed along with our solutions. Our evaluation shows the neural network can execute at over 2.67kHz on an Arm Cortex-M7 processor and flight tests demonstrate a quadcopter running Neuroflight can achieve stable flight and execute aerobatic maneuvers.
Reinforcement Learning for UAV Attitude Control
Apr 11, 2018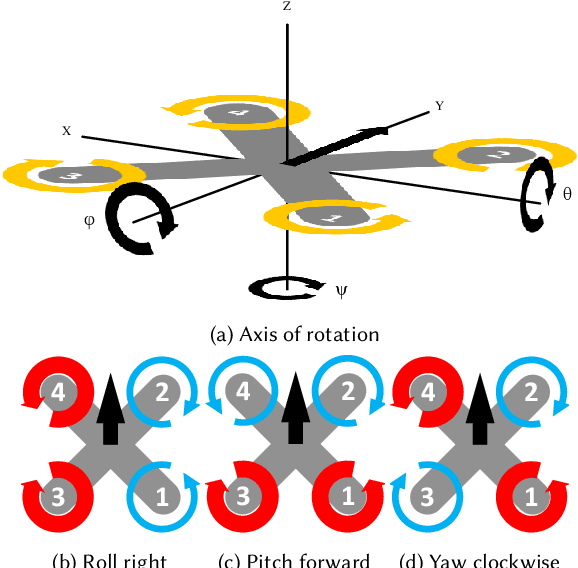
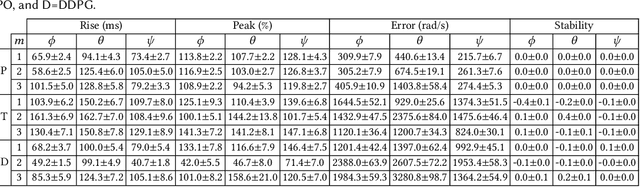
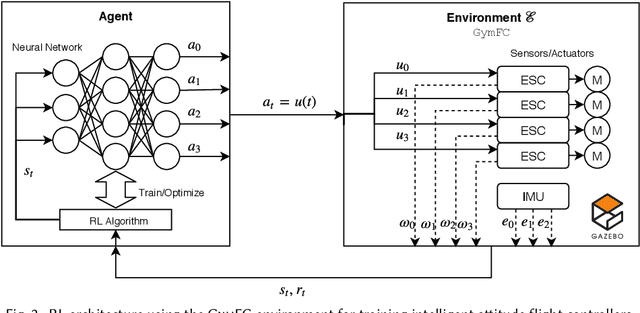
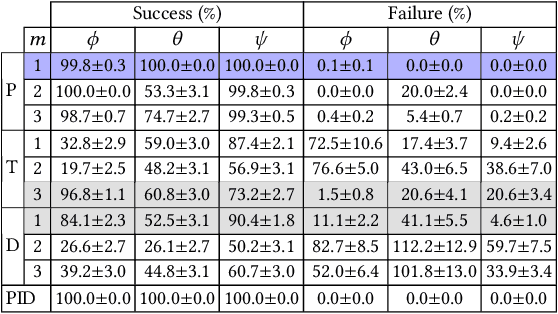
Autopilot systems are typically composed of an "inner loop" providing stability and control, while an "outer loop" is responsible for mission-level objectives, e.g. way-point navigation. Autopilot systems for UAVs are predominately implemented using Proportional, Integral Derivative (PID) control systems, which have demonstrated exceptional performance in stable environments. However more sophisticated control is required to operate in unpredictable, and harsh environments. Intelligent flight control systems is an active area of research addressing limitations of PID control most recently through the use of reinforcement learning (RL) which has had success in other applications such as robotics. However previous work has focused primarily on using RL at the mission-level controller. In this work, we investigate the performance and accuracy of the inner control loop providing attitude control when using intelligent flight control systems trained with the state-of-the-art RL algorithms, Deep Deterministic Gradient Policy (DDGP), Trust Region Policy Optimization (TRPO) and Proximal Policy Optimization (PPO). To investigate these unknowns we first developed an open-source high-fidelity simulation environment to train a flight controller attitude control of a quadrotor through RL. We then use our environment to compare their performance to that of a PID controller to identify if using RL is appropriate in high-precision, time-critical flight control.
Team Formation for Scheduling Educational Material in Massive Online Classes
Mar 26, 2017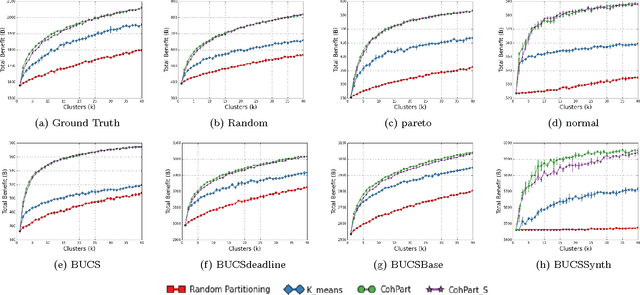
Whether teaching in a classroom or a Massive Online Open Course it is crucial to present the material in a way that benefits the audience as a whole. We identify two important tasks to solve towards this objective, 1 group students so that they can maximally benefit from peer interaction and 2 find an optimal schedule of the educational material for each group. Thus, in this paper, we solve the problem of team formation and content scheduling for education. Given a time frame d, a set of students S with their required need to learn different activities T and given k as the number of desired groups, we study the problem of finding k group of students. The goal is to teach students within time frame d such that their potential for learning is maximized and find the best schedule for each group. We show this problem to be NP-hard and develop a polynomial algorithm for it. We show our algorithm to be effective both on synthetic as well as a real data set. For our experiments, we use real data on students' grades in a Computer Science department. As part of our contribution, we release a semi-synthetic dataset that mimics the properties of the real data.