 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Pooling through the Data Mode
Jun 21, 2021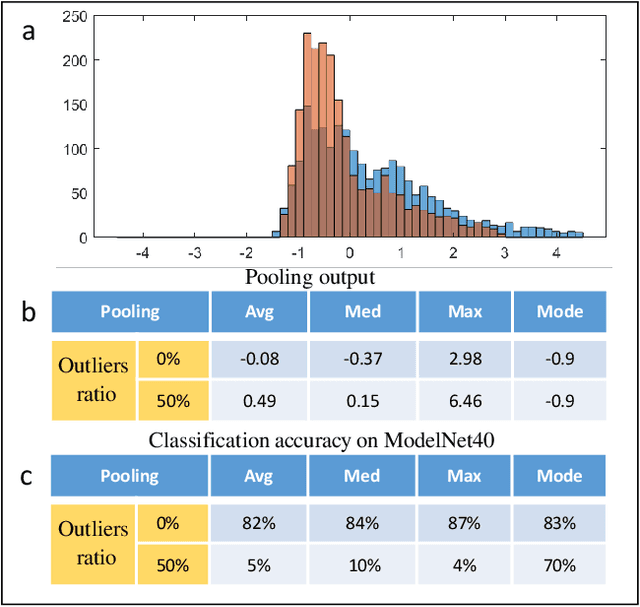
The task of learning from point cloud data is always challenging due to the often occurrence of noise and outliers in the data. Such data inaccuracies can significantly influence the performance of state-of-the-art deep learning networks and their ability to classify or segment objects. While there are some robust deep learning approaches, they are computationally too expensive for real-time applications. This paper proposes a deep learning solution that includes a novel robust pooling layer which greatly enhances network robustness and performs significantly faster than state-of-the-art approaches. The proposed pooling layer looks for data a mode/cluster using two methods, RANSAC, and histogram, as clusters are indicative of models. We tested the pooling layer into frameworks such as Point-based and graph-based neural networks, and the tests showed enhanced robustness as compared to robust state-of-the-art methods.
Robust Object Classification Approach using Spherical Harmonics
Sep 02, 2020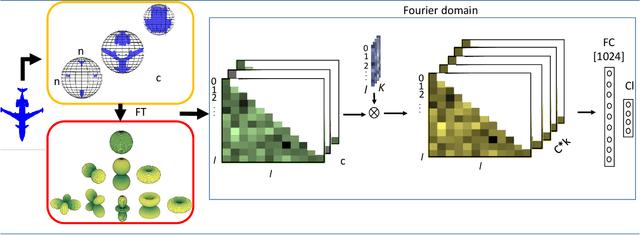
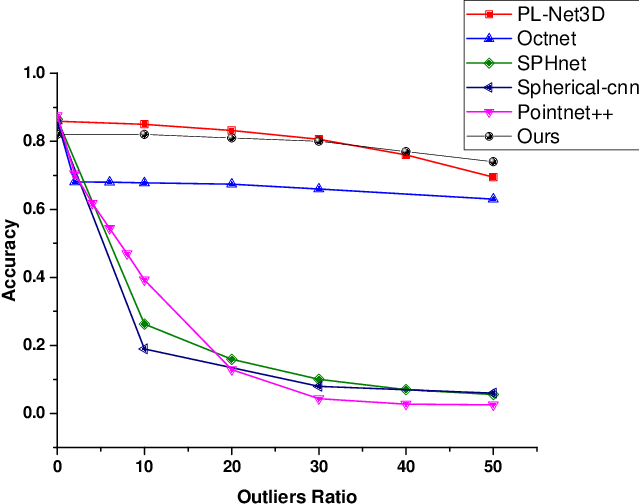
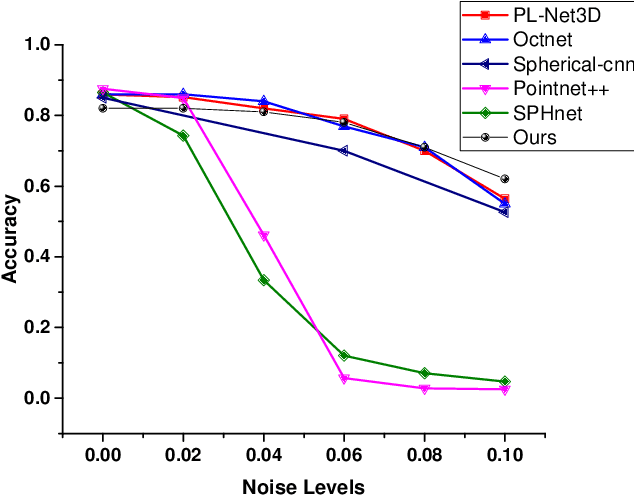
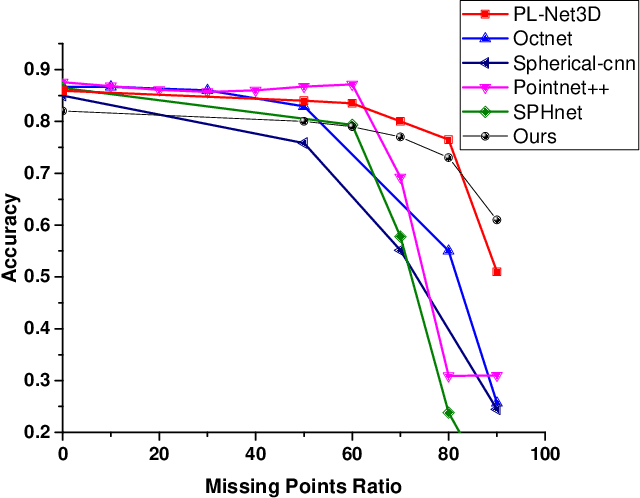
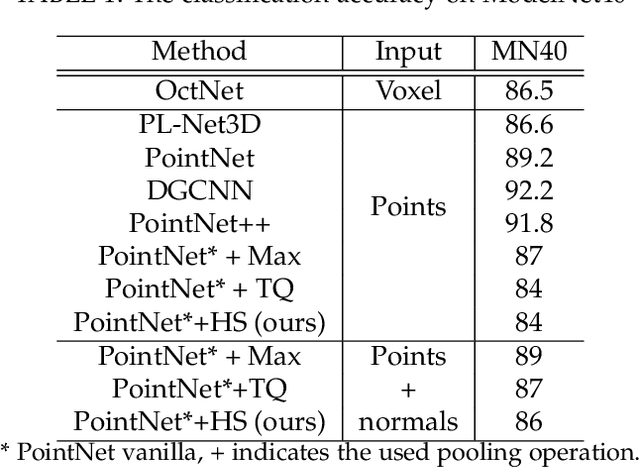
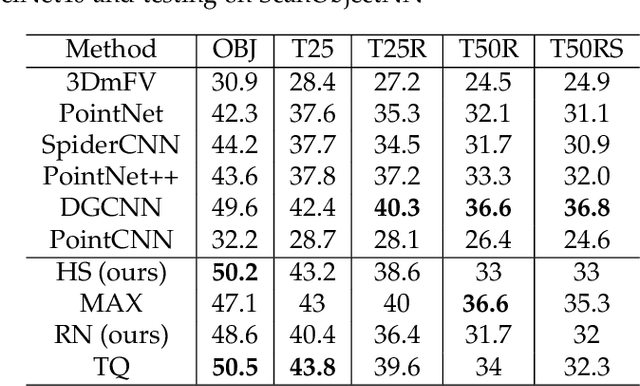
In this paper, we present a robust spherical harmonics approach for the classification of point cloud-based objects. Spherical harmonics have been used for classification over the years, with several frameworks existing in the literature. These approaches use variety of spherical harmonics based descriptors to classify objects. We first investigated these frameworks robustness against data augmentation, such as outliers and noise, as it has not been studied before. Then we propose a spherical convolution neural network framework for robust object classification. The proposed framework uses the voxel grid of concentric spheres to learn features over the unit ball. Our proposed model learn features that are less sensitive to data augmentation due to the selected sampling strategy and the designed convolution operation. We tested our proposed model against several types of data augmentation, such as noise and outliers. Our results show that the proposed model outperforms the state of art networks in terms of robustness to data augmentation.