 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat is the Best Grid-Map for Self-Driving Cars Localization? An Evaluation under Diverse Types of Illumination, Traffic, and Environment
Sep 19, 2020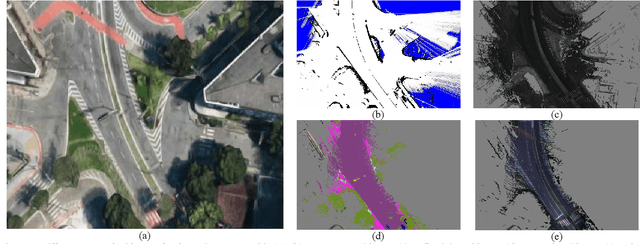
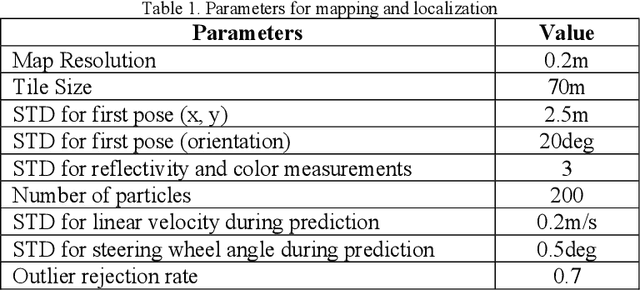
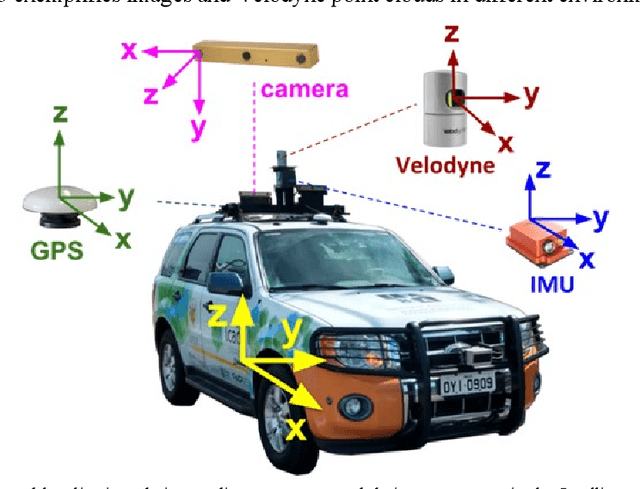
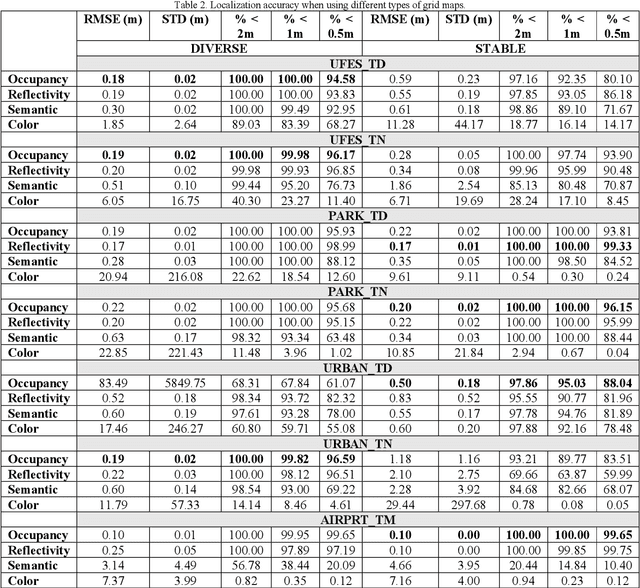
The localization of self-driving cars is needed for several tasks such as keeping maps updated, tracking objects, and planning. Localization algorithms often take advantage of maps for estimating the car pose. Since maintaining and using several maps is computationally expensive, it is important to analyze which type of map is more adequate for each application. In this work, we provide data for such analysis by comparing the accuracy of a particle filter localization when using occupancy, reflectivity, color, or semantic grid maps. To the best of our knowledge, such evaluation is missing in the literature. For building semantic and colour grid maps, point clouds from a Light Detection and Ranging (LiDAR) sensor are fused with images captured by a front-facing camera. Semantic information is extracted from images with a deep neural network. Experiments are performed in varied environments, under diverse conditions of illumination and traffic. Results show that occupancy grid maps lead to more accurate localization, followed by reflectivity grid maps. In most scenarios, the localization with semantic grid maps kept the position tracking without catastrophic losses, but with errors from 2 to 3 times bigger than the previous. Colour grid maps led to inaccurate and unstable localization even using a robust metric, the entropy correlation coefficient, for comparing online data and the map.
Self-Driving Cars: A Survey
Jan 14, 2019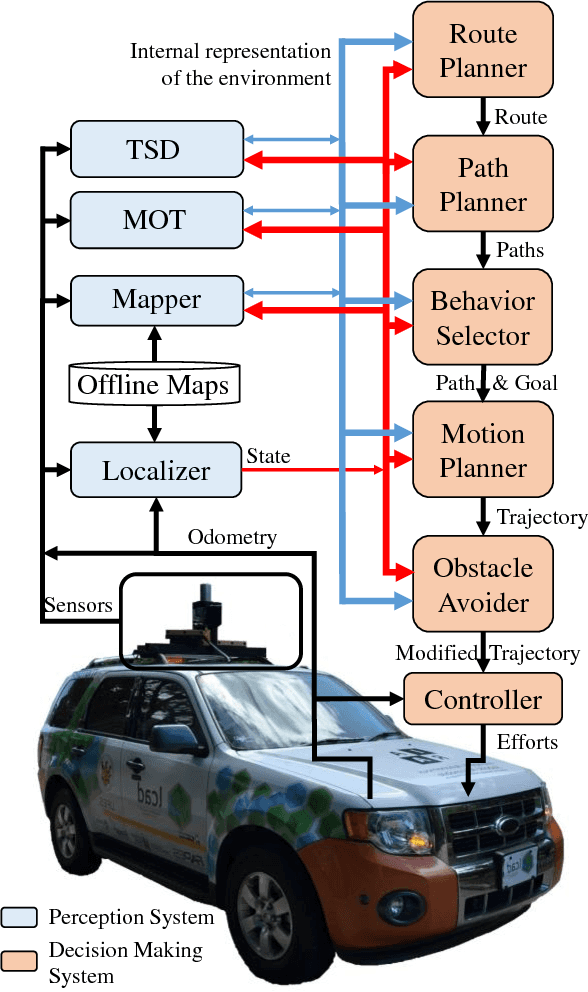
We survey research on self-driving cars published in the literature focusing on autonomous cars developed since the DARPA challenges, which are equipped with an autonomy system that can be categorized as SAE level 3 or higher. The architecture of the autonomy system of self-driving cars is typically organized into the perception system and the decision-making system. The perception system is generally divided into many subsystems responsible for tasks such as self-driving-car localization, static obstacles mapping, moving obstacles detection and tracking, road mapping, traffic signalization detection and recognition, among others. The decision-making system is commonly partitioned as well into many subsystems responsible for tasks such as route planning, path planning, behavior selection, motion planning, and control. In this survey, we present the typical architecture of the autonomy system of self-driving cars. We also review research on relevant methods for perception and decision making. Furthermore, we present a detailed description of the architecture of the autonomy system of the UFES's car, IARA. Finally, we list prominent autonomous research cars developed by technology companies and reported in the media.
Visual Global Localization with a Hybrid WNN-CNN Approach
May 14, 2018
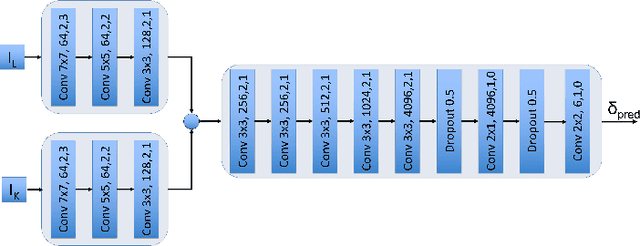
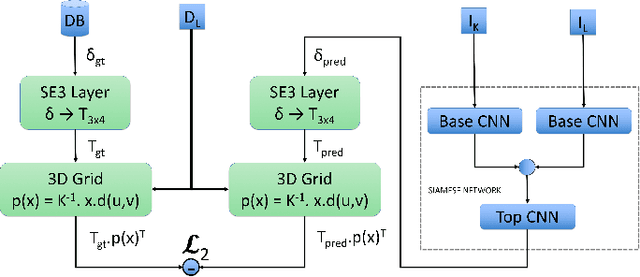

Currently, self-driving cars rely greatly on the Global Positioning System (GPS) infrastructure, albeit there is an increasing demand for alternative methods for GPS-denied environments. One of them is known as place recognition, which associates images of places with their corresponding positions. We previously proposed systems based on Weightless Neural Networks (WNN) to address this problem as a classification task. This encompasses solely one part of the global localization, which is not precise enough for driverless cars. Instead of just recognizing past places and outputting their poses, it is desired that a global localization system estimates the pose of current place images. In this paper, we propose to tackle this problem as follows. Firstly, given a live image, the place recognition system returns the most similar image and its pose. Then, given live and recollected images, a visual localization system outputs the relative camera pose represented by those images. To estimate the relative camera pose between the recollected and the current images, a Convolutional Neural Network (CNN) is trained with the two images as input and a relative pose vector as output. Together, these systems solve the global localization problem using the topological and metric information to approximate the current vehicle pose. The full approach is compared to a Real- Time Kinematic GPS system and a Simultaneous Localization and Mapping (SLAM) system. Experimental results show that the proposed approach correctly localizes a vehicle 90% of the time with a mean error of 1.20m compared to 1.12m of the SLAM system and 0.37m of the GPS, 89% of the time.