 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEncirclement Guaranteed Finite-Time Capture against Unknown Evader Strategies
Mar 16, 2026We consider a pursuit-evasion scenario involving a group of pursuers and a single evader in a two-dimensional unbounded environment. The pursuers aim to capture the evader in finite time while ensuring the evader remains enclosed within the convex hull of their positions until capture, without knowledge of the evader's heading angle. Prior works have addressed the problem of encirclement and capture separately in different contexts. In this paper, we present a class of strategies for the pursuers that guarantee capture in finite time while maintaining encirclement, irrespective of the evader's strategy. Furthermore, we derive an upper bound on the time to capture. Numerical results highlight the effectiveness of the proposed framework against a range of evader strategies.
When Environments Shift: Safe Planning with Generative Priors and Robust Conformal Prediction
Feb 13, 2026Autonomous systems operate in environments that may change over time. An example is the control of a self-driving vehicle among pedestrians and human-controlled vehicles whose behavior may change based on factors such as traffic density, road visibility, and social norms. Therefore, the environment encountered during deployment rarely mirrors the environment and data encountered during training -- a phenomenon known as distribution shift -- which can undermine the safety of autonomous systems. Conformal prediction (CP) has recently been used along with data from the training environment to provide prediction regions that capture the behavior of the environment with a desired probability. When embedded within a model predictive controller (MPC), one can provide probabilistic safety guarantees, but only when the deployment and training environments coincide. Once a distribution shift occurs, these guarantees collapse. We propose a planning framework that is robust under distribution shifts by: (i) assuming that the underlying data distribution of the environment is parameterized by a nuisance parameter, i.e., an observable, interpretable quantity such as traffic density, (ii) training a conditional diffusion model that captures distribution shifts as a function of the nuisance parameter, (iii) observing the nuisance parameter online and generating cheap, synthetic data from the diffusion model for the observed nuisance parameter, and (iv) designing an MPC that embeds CP regions constructed from such synthetic data. Importantly, we account for discrepancies between the underlying data distribution and the diffusion model by using robust CP. Thus, the plans computed using robust CP enjoy probabilistic safety guarantees, in contrast with plans obtained from a single, static set of training data. We empirically demonstrate safety under diverse distribution shifts in the ORCA simulator.
Data-Driven Robust Optimization for Energy-Aware and Safe Navigation of Electric Vehicles
Apr 25, 2023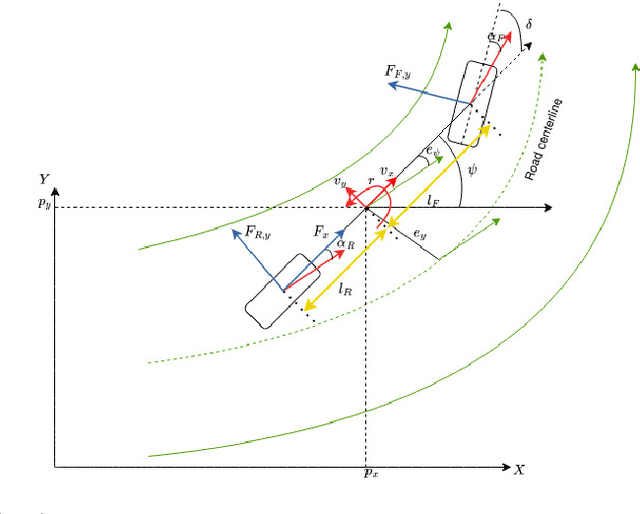
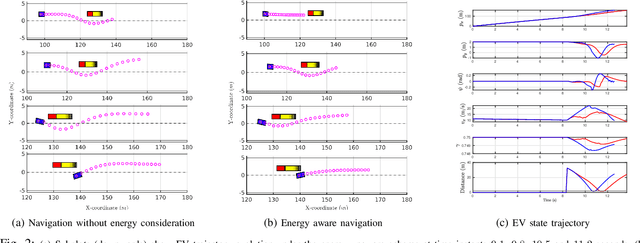
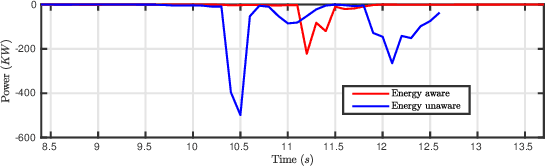
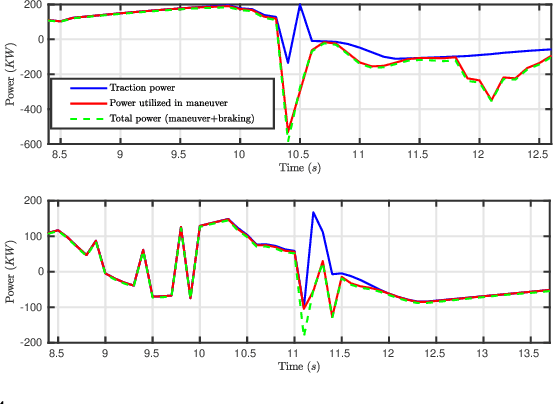
In this paper, we simultaneously tackle the problem of energy optimal and safe navigation of electric vehicles in a data-driven robust optimization framework. We consider a dynamic model of the electric vehicle which includes both longitudinal and lateral motion as well as dynamics of stored energy level. We leverage past data of obstacle motion to construct a future occupancy set with probabilistic guarantees, and formulate robust collision avoidance constraints with respect to such an occupancy set using convex programming duality. Consequently, we present the finite horizon optimal control problem subject to robust collision avoidance constraints while penalizing resulting energy consumption. Finally, we show the effectiveness of the proposed techniques in reducing energy consumption and ensuring safe navigation via extensive simulations.
Generalized Gradient Flows with Provable Fixed-Time Convergence and Fast Evasion of Non-Degenerate Saddle Points
Dec 07, 2022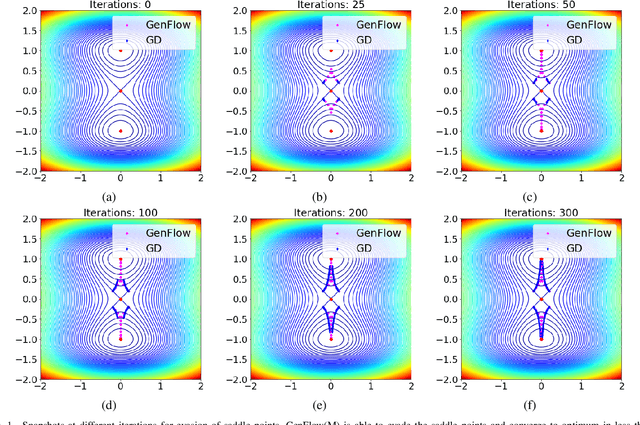
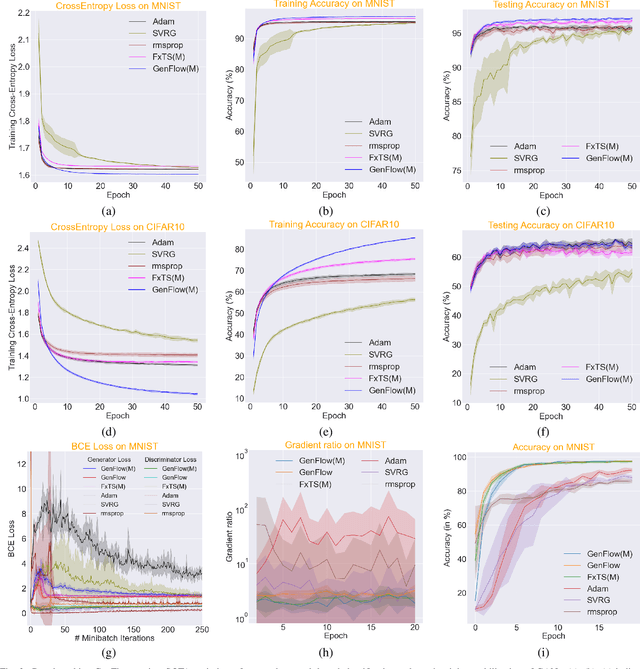
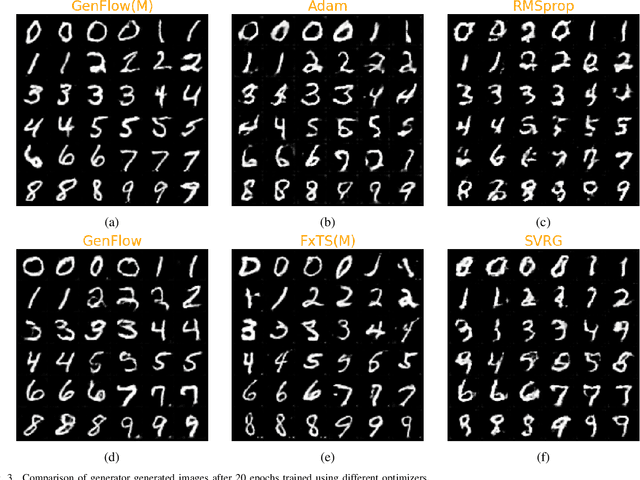
Gradient-based first-order convex optimization algorithms find widespread applicability in a variety of domains, including machine learning tasks. Motivated by the recent advances in fixed-time stability theory of continuous-time dynamical systems, we introduce a generalized framework for designing accelerated optimization algorithms with strongest convergence guarantees that further extend to a subclass of non-convex functions. In particular, we introduce the \emph{GenFlow} algorithm and its momentum variant that provably converge to the optimal solution of objective functions satisfying the Polyak-{\L}ojasiewicz (PL) inequality, in a fixed-time. Moreover for functions that admit non-degenerate saddle-points, we show that for the proposed GenFlow algorithm, the time required to evade these saddle-points is bounded uniformly for all initial conditions. Finally, for strongly convex-strongly concave minimax problems whose optimal solution is a saddle point, a similar scheme is shown to arrive at the optimal solution again in a fixed-time. The superior convergence properties of our algorithm are validated experimentally on a variety of benchmark datasets.
Data-Driven Risk-sensitive Model Predictive Control for Safe Navigation in Multi-Robot Systems
Sep 16, 2022
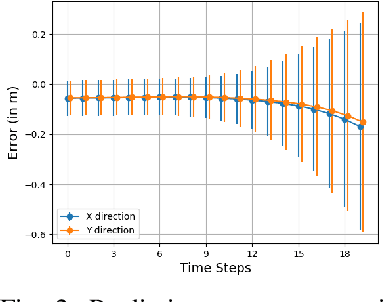
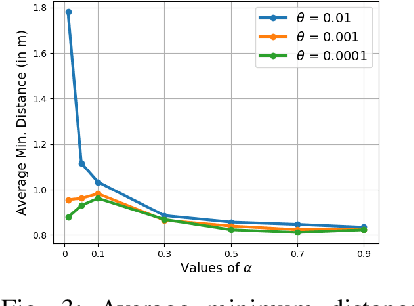
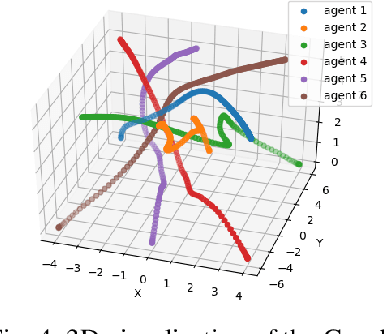
Safe navigation is a fundamental challenge in multi-robot systems due to the uncertainty surrounding the future trajectory of the robots that act as obstacles for each other. In this work, we propose a principled data-driven approach where each robot repeatedly solves a finite horizon optimization problem subject to collision avoidance constraints with latter being formulated as distributionally robust conditional value-at-risk (CVaR) of the distance between the agent and a polyhedral obstacle geometry. Specifically, the CVaR constraints are required to hold for all distributions that are close to the empirical distribution constructed from observed samples of prediction error collected during execution. The generality of the approach allows us to robustify against prediction errors that arise under commonly imposed assumptions in both distributed and decentralized settings. We derive tractable finite-dimensional approximations of this class of constraints by leveraging convex and minmax duality results for Wasserstein distributionally robust optimization problems. The effectiveness of the proposed approach is illustrated in a multi-drone navigation setting implemented in Gazebo platform.