 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRich Vehicle Routing Problem with diverse Vertices allowing Hierarchical and Multimodal Time-Dependant Transhipment of multiple Node- Vehicle- compatible Cargo with Cascaded Time-Minimization Objective for Emergency Decision Support Systems
Sep 16, 2025A rich vehicle routing problem is considered allowing multiple trips of heterogeneous vehicles stationed at distributed vehicle depots spread across diverse geographies having access to different modes of transportation. The problem arises from the real world requirement of optimizing the disaster response/preparedness time and minimizes the route duration of the vehicles to achieve the solution with the minimum highest-vehicle-route-duration. Multiple diversely-functional vertices are considered including the concept of Transhipment Ports as inter-modal resource transfer stations. Both simultaneous and split pickup and transferring of different types of delivery and pickup cargo is considered, along with Vehicle-Cargo and Transhipment Port-Cargo Compatibility. The superiority of the proposed cascaded minimization approach is shown over existing makespan minimization approaches through the developed MILP formulation. To solve the problem quickly for practical implementation within Disaster Management-specific Decision Support Systems, an extensive Heuristic Algorithm is devised. The Heuristic utilizes Decision Tree based structuring of possible routes and is able to inherently consider the compatibility issues. Preferential generation of small route elements are performed, which are integrated into route clusters; we consider multiple different logical integration approaches, as well as shuffling the logics to simultaneously produce multiple independent solutions. Finally perturbation of the different solutions are done to find better neighbouring solutions. The computational performance of the PSR-GIP Heuristic, on our created novel datasets, indicate that it is able to give good solutions swiftly for practical problems involving large integer instances which the MILP is unable to solve.
Data-Driven Robust Optimization for Energy-Aware and Safe Navigation of Electric Vehicles
Apr 25, 2023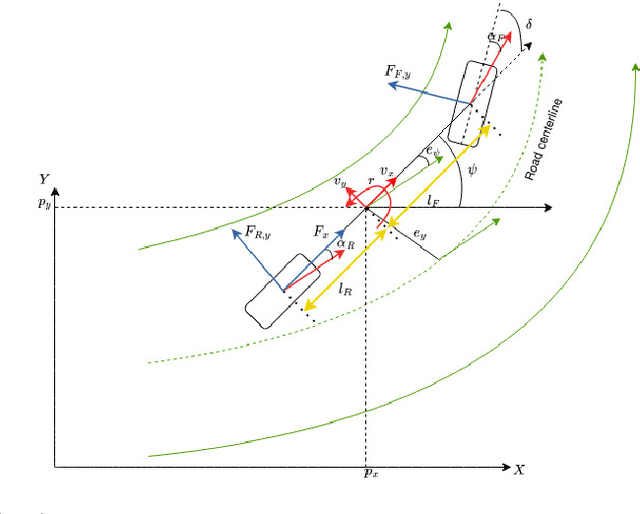
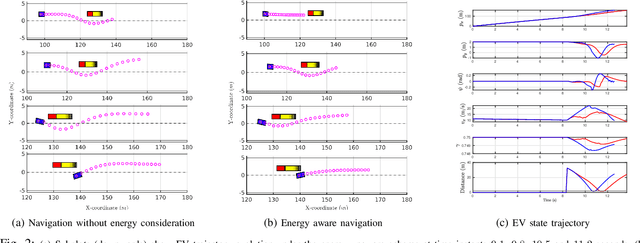
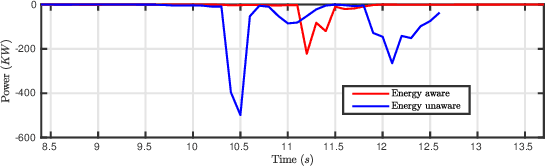
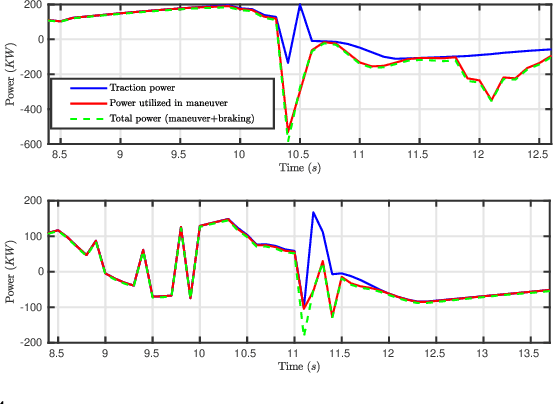
In this paper, we simultaneously tackle the problem of energy optimal and safe navigation of electric vehicles in a data-driven robust optimization framework. We consider a dynamic model of the electric vehicle which includes both longitudinal and lateral motion as well as dynamics of stored energy level. We leverage past data of obstacle motion to construct a future occupancy set with probabilistic guarantees, and formulate robust collision avoidance constraints with respect to such an occupancy set using convex programming duality. Consequently, we present the finite horizon optimal control problem subject to robust collision avoidance constraints while penalizing resulting energy consumption. Finally, we show the effectiveness of the proposed techniques in reducing energy consumption and ensuring safe navigation via extensive simulations.