 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompositional Shielding and Reinforcement Learning for Multi-Agent Systems
Oct 14, 2024
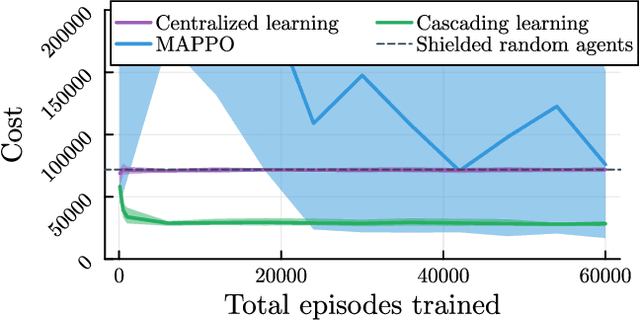
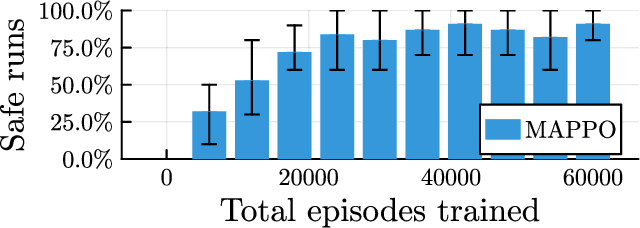
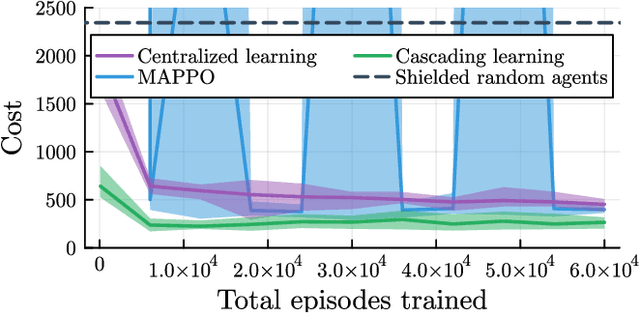
Deep reinforcement learning has emerged as a powerful tool for obtaining high-performance policies. However, the safety of these policies has been a long-standing issue. One promising paradigm to guarantee safety is a shield, which shields a policy from making unsafe actions. However, computing a shield scales exponentially in the number of state variables. This is a particular concern in multi-agent systems with many agents. In this work, we propose a novel approach for multi-agent shielding. We address scalability by computing individual shields for each agent. The challenge is that typical safety specifications are global properties, but the shields of individual agents only ensure local properties. Our key to overcome this challenge is to apply assume-guarantee reasoning. Specifically, we present a sound proof rule that decomposes a (global, complex) safety specification into (local, simple) obligations for the shields of the individual agents. Moreover, we show that applying the shields during reinforcement learning significantly improves the quality of the policies obtained for a given training budget. We demonstrate the effectiveness and scalability of our multi-agent shielding framework in two case studies, reducing the computation time from hours to seconds and achieving fast learning convergence.
Efficient Shield Synthesis via State-Space Transformation
Jul 29, 2024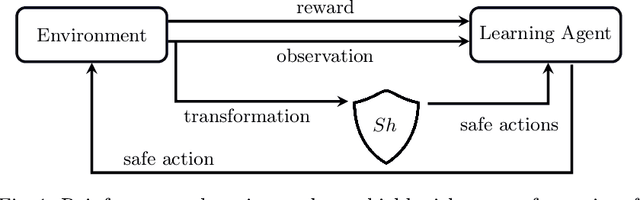
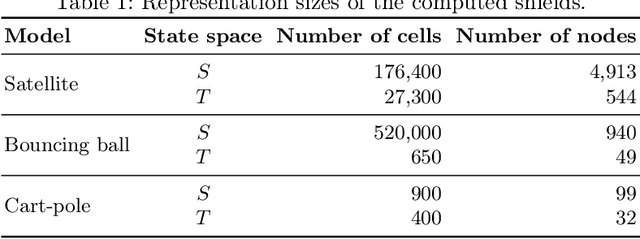
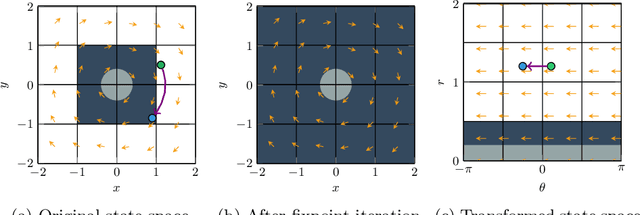

We consider the problem of synthesizing safety strategies for control systems, also known as shields. Since the state space is infinite, shields are typically computed over a finite-state abstraction, with the most common abstraction being a rectangular grid. However, for many systems, such a grid does not align well with the safety property or the system dynamics. That is why a coarse grid is rarely sufficient, but a fine grid is typically computationally infeasible to obtain. In this paper, we show that appropriate state-space transformations can still allow to use a coarse grid at almost no computational overhead. We demonstrate in three case studies that our transformation-based synthesis outperforms a standard synthesis by several orders of magnitude. In the first two case studies, we use domain knowledge to select a suitable transformation. In the third case study, we instead report on results in engineering a transformation without domain knowledge.
Shielded Reinforcement Learning for Hybrid Systems
Aug 28, 2023Safe and optimal controller synthesis for switched-controlled hybrid systems, which combine differential equations and discrete changes of the system's state, is known to be intricately hard. Reinforcement learning has been leveraged to construct near-optimal controllers, but their behavior is not guaranteed to be safe, even when it is encouraged by reward engineering. One way of imposing safety to a learned controller is to use a shield, which is correct by design. However, obtaining a shield for non-linear and hybrid environments is itself intractable. In this paper, we propose the construction of a shield using the so-called barbaric method, where an approximate finite representation of an underlying partition-based two-player safety game is extracted via systematically picked samples of the true transition function. While hard safety guarantees are out of reach, we experimentally demonstrate strong statistical safety guarantees with a prototype implementation and UPPAAL STRATEGO. Furthermore, we study the impact of the synthesized shield when applied as either a pre-shield (applied before learning a controller) or a post-shield (only applied after learning a controller). We experimentally demonstrate superiority of the pre-shielding approach. We apply our technique on a range of case studies, including two industrial examples, and further study post-optimization of the post-shielding approach.