 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe NVIDIA PilotNet Experiments
Oct 17, 2020
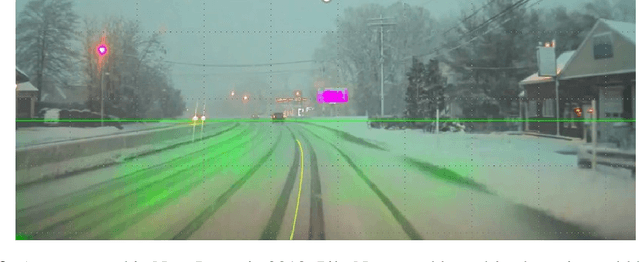

Four years ago, an experimental system known as PilotNet became the first NVIDIA system to steer an autonomous car along a roadway. This system represents a departure from the classical approach for self-driving in which the process is manually decomposed into a series of modules, each performing a different task. In PilotNet, on the other hand, a single deep neural network (DNN) takes pixels as input and produces a desired vehicle trajectory as output; there are no distinct internal modules connected by human-designed interfaces. We believe that handcrafted interfaces ultimately limit performance by restricting information flow through the system and that a learned approach, in combination with other artificial intelligence systems that add redundancy, will lead to better overall performing systems. We continue to conduct research toward that goal. This document describes the PilotNet lane-keeping effort, carried out over the past five years by our NVIDIA PilotNet group in Holmdel, New Jersey. Here we present a snapshot of system status in mid-2020 and highlight some of the work done by the PilotNet group.
Fast Incremental Learning for Off-Road Robot Navigation
Jun 26, 2016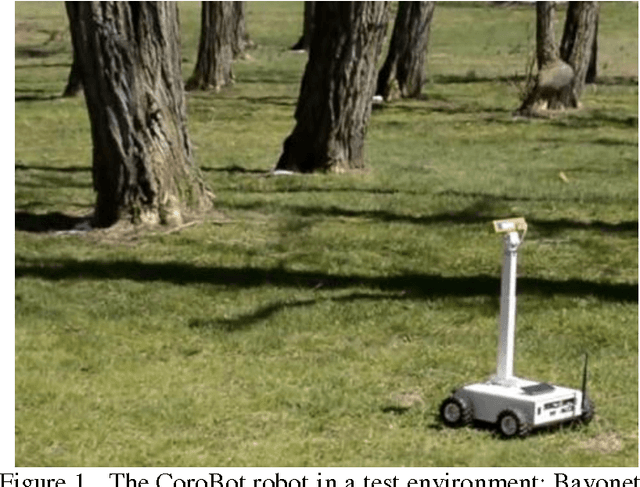
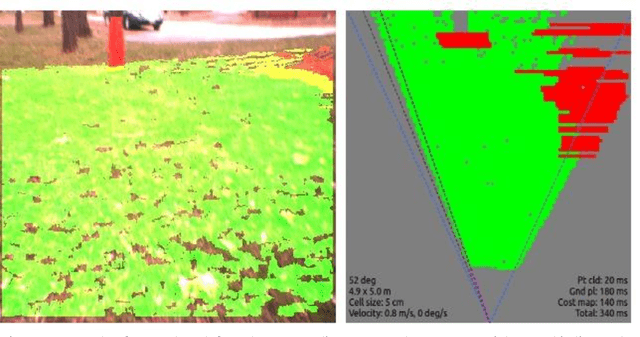
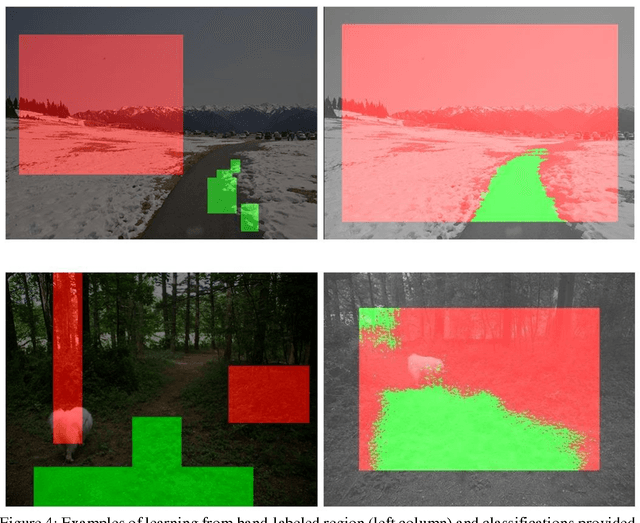
A promising approach to autonomous driving is machine learning. In such systems, training datasets are created that capture the sensory input to a vehicle as well as the desired response. A disadvantage of using a learned navigation system is that the learning process itself may require a huge number of training examples and a large amount of computing. To avoid the need to collect a large training set of driving examples, we describe a system that takes advantage of the huge number of training examples provided by ImageNet, but is able to adapt quickly using a small training set for the specific driving environment.