 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSO-DETR: Leveraging Dual-Domain Features and Knowledge Distillation for Small Object Detection
Apr 11, 2025



Detection Transformer-based methods have achieved significant advancements in general object detection. However, challenges remain in effectively detecting small objects. One key difficulty is that existing encoders struggle to efficiently fuse low-level features. Additionally, the query selection strategies are not effectively tailored for small objects. To address these challenges, this paper proposes an efficient model, Small Object Detection Transformer (SO-DETR). The model comprises three key components: a dual-domain hybrid encoder, an enhanced query selection mechanism, and a knowledge distillation strategy. The dual-domain hybrid encoder integrates spatial and frequency domains to fuse multi-scale features effectively. This approach enhances the representation of high-resolution features while maintaining relatively low computational overhead. The enhanced query selection mechanism optimizes query initialization by dynamically selecting high-scoring anchor boxes using expanded IoU, thereby improving the allocation of query resources. Furthermore, by incorporating a lightweight backbone network and implementing a knowledge distillation strategy, we develop an efficient detector for small objects. Experimental results on the VisDrone-2019-DET and UAVVaste datasets demonstrate that SO-DETR outperforms existing methods with similar computational demands. The project page is available at https://github.com/ValiantDiligent/SO_DETR.
ReplanVLM: Replanning Robotic Tasks with Visual Language Models
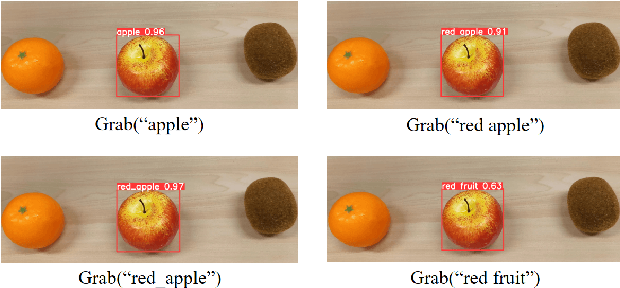
Jul 31, 2024Large language models (LLMs) have gained increasing popularity in robotic task planning due to their exceptional abilities in text analytics and generation, as well as their broad knowledge of the world. However, they fall short in decoding visual cues. LLMs have limited direct perception of the world, which leads to a deficient grasp of the current state of the world. By contrast, the emergence of visual language models (VLMs) fills this gap by integrating visual perception modules, which can enhance the autonomy of robotic task planning. Despite these advancements, VLMs still face challenges, such as the potential for task execution errors, even when provided with accurate instructions. To address such issues, this paper proposes a ReplanVLM framework for robotic task planning. In this study, we focus on error correction interventions. An internal error correction mechanism and an external error correction mechanism are presented to correct errors under corresponding phases. A replan strategy is developed to replan tasks or correct error codes when task execution fails. Experimental results on real robots and in simulation environments have demonstrated the superiority of the proposed framework, with higher success rates and robust error correction capabilities in open-world tasks. Videos of our experiments are available at https://youtu.be/NPk2pWKazJc.
GameVLM: A Decision-making Framework for Robotic Task Planning Based on Visual Language Models and Zero-sum Games
May 22, 2024


With their prominent scene understanding and reasoning capabilities, pre-trained visual-language models (VLMs) such as GPT-4V have attracted increasing attention in robotic task planning. Compared with traditional task planning strategies, VLMs are strong in multimodal information parsing and code generation and show remarkable efficiency. Although VLMs demonstrate great potential in robotic task planning, they suffer from challenges like hallucination, semantic complexity, and limited context. To handle such issues, this paper proposes a multi-agent framework, i.e., GameVLM, to enhance the decision-making process in robotic task planning. In this study, VLM-based decision and expert agents are presented to conduct the task planning. Specifically, decision agents are used to plan the task, and the expert agent is employed to evaluate these task plans. Zero-sum game theory is introduced to resolve inconsistencies among different agents and determine the optimal solution. Experimental results on real robots demonstrate the efficacy of the proposed framework, with an average success rate of 83.3%.