 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShaping Rewards, Shaping Routes: On Multi-Agent Deep Q-Networks for Routing in Satellite Constellation Networks
Aug 04, 2024



Effective routing in satellite mega-constellations has become crucial to facilitate the handling of increasing traffic loads, more complex network architectures, as well as the integration into 6G networks. To enhance adaptability as well as robustness to unpredictable traffic demands, and to solve dynamic routing environments efficiently, machine learning-based solutions are being considered. For network control problems, such as optimizing packet forwarding decisions according to Quality of Service requirements and maintaining network stability, deep reinforcement learning techniques have demonstrated promising results. For this reason, we investigate the viability of multi-agent deep Q-networks for routing in satellite constellation networks. We focus specifically on reward shaping and quantifying training convergence for joint optimization of latency and load balancing in static and dynamic scenarios. To address identified drawbacks, we propose a novel hybrid solution based on centralized learning and decentralized control.
Edge-Aided Sensor Data Sharing in Vehicular Communication Networks
Jun 17, 2022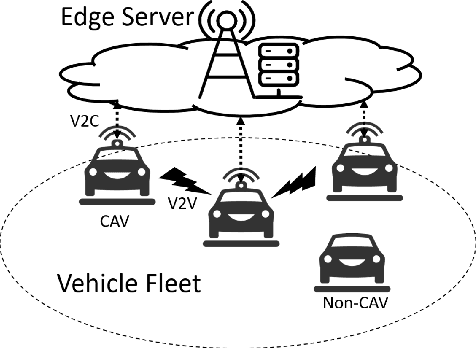
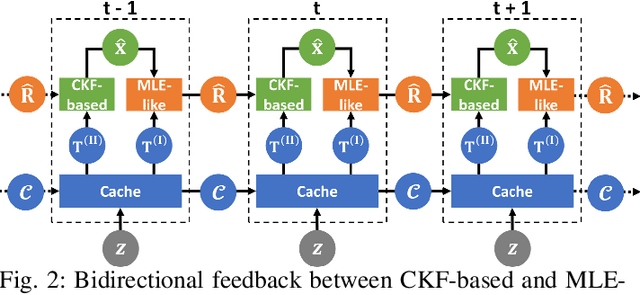
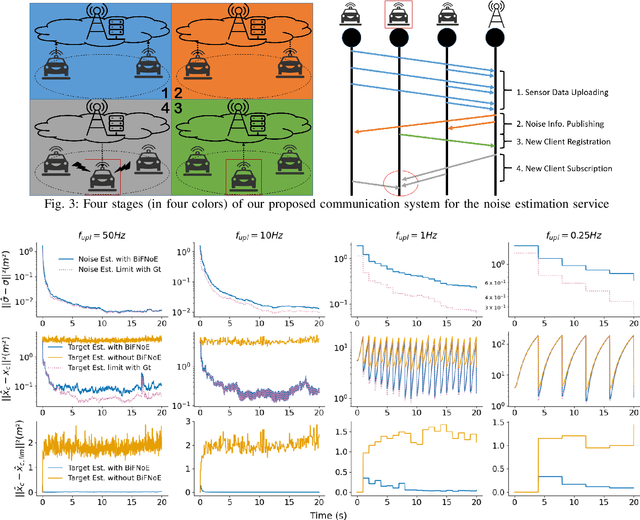
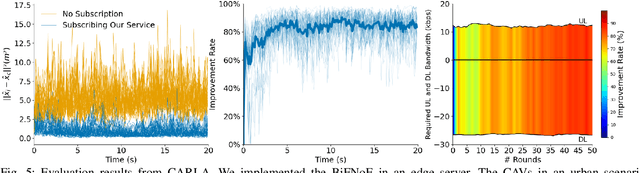
Sensor data sharing in vehicular networks can significantly improve the range and accuracy of environmental perception for connected automated vehicles. Different concepts and schemes for dissemination and fusion of sensor data have been developed. It is common to these schemes that measurement errors of the sensors impair the perception quality and can result in road traffic accidents. Specifically, when the measurement error from the sensors (also referred as measurement noise) is unknown and time varying, the performance of the data fusion process is restricted, which represents a major challenge in the calibration of sensors. In this paper, we consider sensor data sharing and fusion in a vehicular network with both, vehicle-to-infrastructure and vehicle-to-vehicle communication. We propose a method, named Bidirectional Feedback Noise Estimation (BiFNoE), in which an edge server collects and caches sensor measurement data from vehicles. The edge estimates the noise and the targets alternately in double dynamic sliding time windows and enhances the distributed cooperative environment sensing at each vehicle with low communication costs. We evaluate the proposed algorithm and data dissemination strategy in an application scenario by simulation and show that the perception accuracy is on average improved by around 80 % with only 12 kbps uplink and 28 kbps downlink bandwidth.