 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-field high throughput grapevine phenotyping with a consumer-grade depth camera
Apr 14, 2021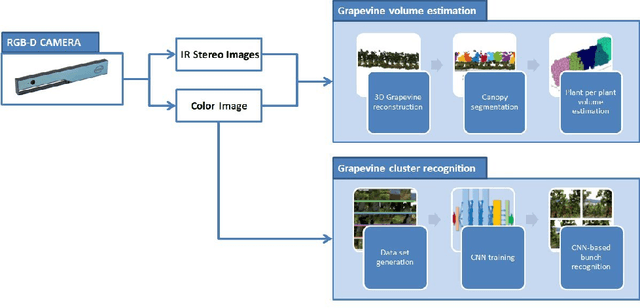
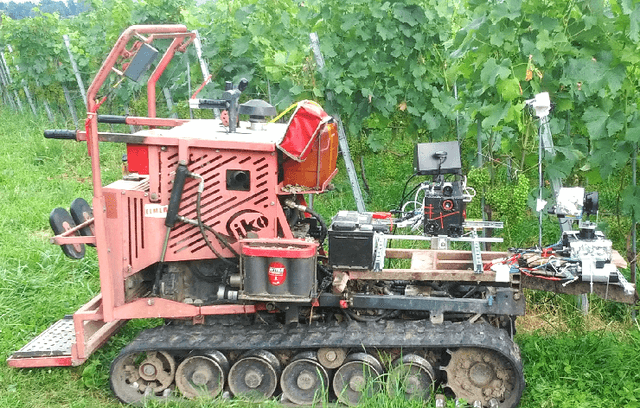

Plant phenotyping, that is, the quantitative assessment of plant traits including growth, morphology, physiology, and yield, is a critical aspect towards efficient and effective crop management. Currently, plant phenotyping is a manually intensive and time consuming process, which involves human operators making measurements in the field, based on visual estimates or using hand-held devices. In this work, methods for automated grapevine phenotyping are developed, aiming to canopy volume estimation and bunch detection and counting. It is demonstrated that both measurements can be effectively performed in the field using a consumer-grade depth camera mounted onboard an agricultural vehicle.
Distributed Estimation of State and Parameters in Multi-Agent Cooperative Load Manipulation
Sep 23, 2018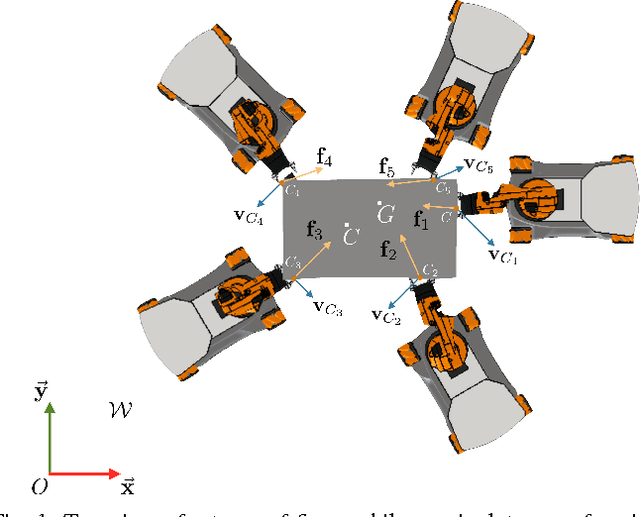
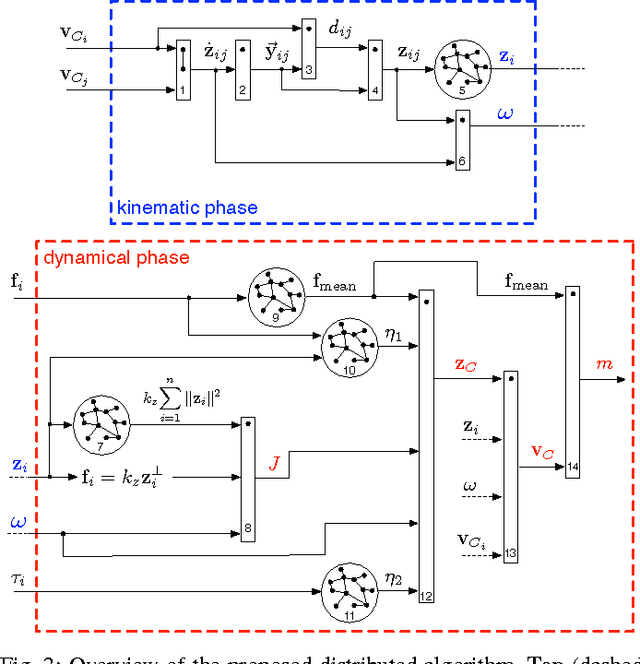
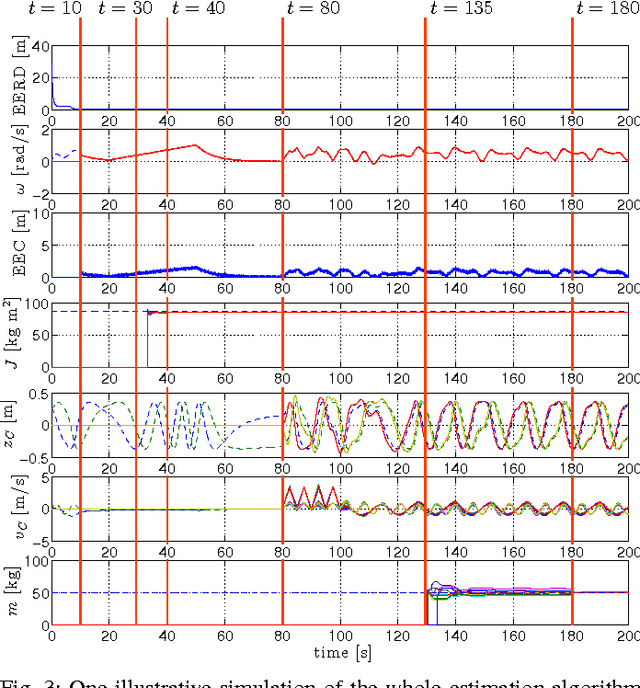
We present two distributed methods for the estimation of the kinematic parameters, the dynamic parameters, and the kinematic state of an unknown planar body manipulated by a decentralized multi-agent system. The proposed approaches rely on the rigid body kinematics and dynamics, on nonlinear observation theory, and on consensus algorithms. The only three requirements are that each agent can exert a 2D wrench on the load, it can measure the velocity of its contact point, and that the communication graph is connected. Both theoretical nonlinear observability analysis and convergence proofs are provided. The first method assumes constant parameters while the second one can deal with time-varying parameters and can be applied in parallel to any task-oriented control law. For the cases in which a control law is not provided, we propose a distributed and safe control strategy satisfying the observability condition. The effectiveness and robustness of the estimation strategy is showcased by means of realistic MonteCarlo simulations.