 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDSCnet: Replicating Lidar Point Clouds with Deep Sensor Cloning
Nov 27, 2018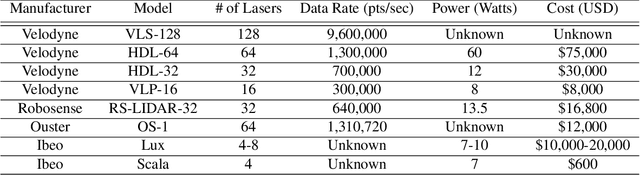
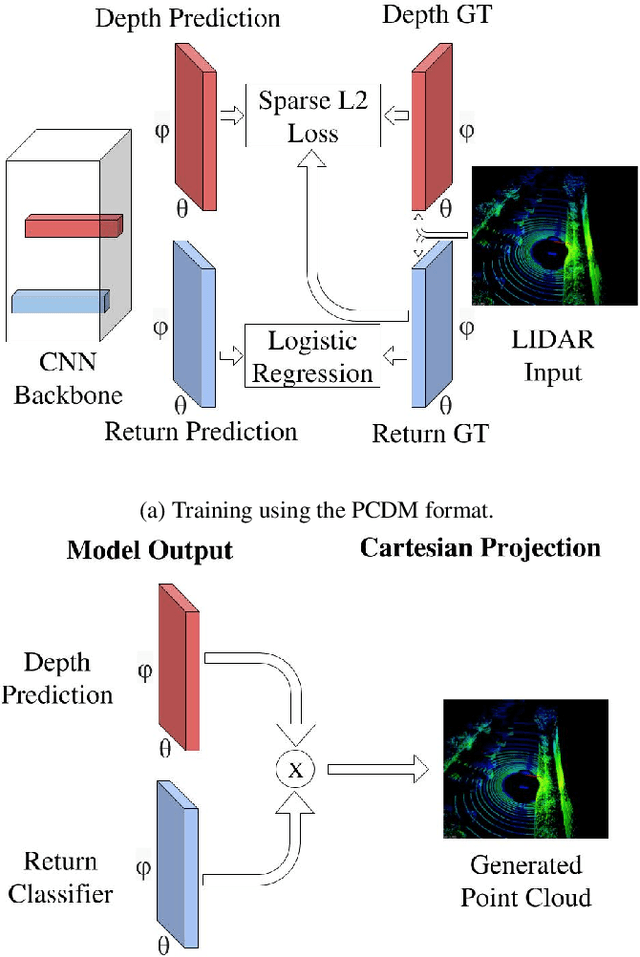

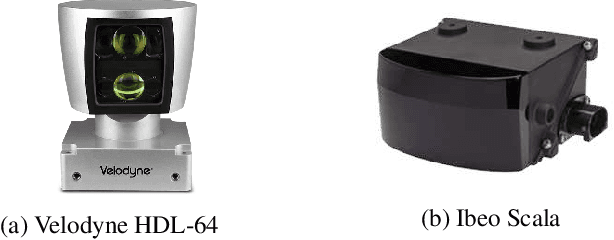
Convolutional neural networks (CNNs) have become increasingly popular for solving a variety of computer vision tasks, ranging from image classification to image segmentation. Recently, autonomous vehicles have created a demand for depth information, which is often obtained using hardware sensors such as Light detection and ranging (LIDAR). Although it can provide precise distance measurements, most LIDARs are still far too expensive to sell in mass-produced consumer vehicles, which has motivated methods to generate depth information from commodity automotive sensors like cameras. In this paper, we propose an approach called Deep Sensor Cloning (DSC). The idea is to use Convolutional Neural Networks in conjunction with inexpensive sensors to replicate the 3D point-clouds that are created by expensive LIDARs. To accomplish this, we develop a new dataset (DSDepth) and a new family of CNN architectures (DSCnets). While previous tasks such as KITTI depth prediction use an interpolated RGB-D images as ground-truth for training, we instead use DSCnets to directly predict LIDAR point-clouds. When we compare the output of our models to a $75,000 LIDAR, we find that our most accurate DSCnet achieves a relative error of 5.77% using a single camera and 4.69% using stereo cameras.
DeepLogo: Hitting Logo Recognition with the Deep Neural Network Hammer
Oct 07, 2015
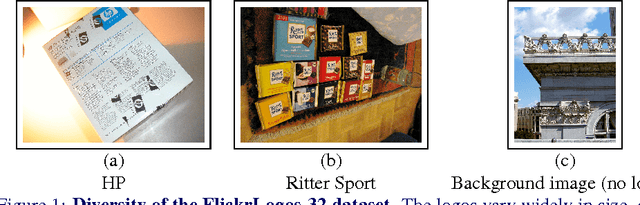
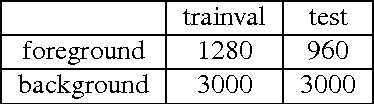
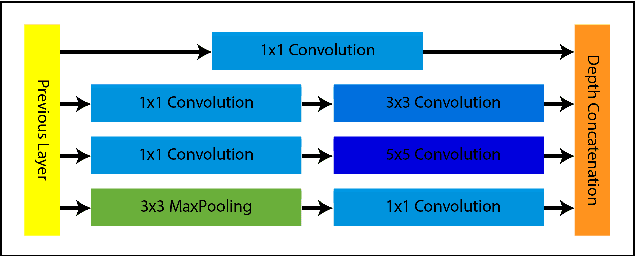
Recently, there has been a flurry of industrial activity around logo recognition, such as Ditto's service for marketers to track their brands in user-generated images, and LogoGrab's mobile app platform for logo recognition. However, relatively little academic or open-source logo recognition progress has been made in the last four years. Meanwhile, deep convolutional neural networks (DCNNs) have revolutionized a broad range of object recognition applications. In this work, we apply DCNNs to logo recognition. We propose several DCNN architectures, with which we surpass published state-of-art accuracy on a popular logo recognition dataset.